





























7-28
Operating Modes
MPH-02, MPB-02, MPD-02
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
7.6 Drive-Controlled
Positioning
Brief Description
The operating modes "drive-internal interpolation" and "drive-controlled
positioning" allow time-optimized positioning of a single axis. The "drive-
internal interpolation" mode is the basis for the more comprehensive
functionality of the "drive-controlled positioning" mode.
In the "drive-controlled positioning" mode a positioning command value is
preset for the drive. The drive can continue processing this value
internally in absolute (position target) or relative (travel distance) form. In
the internal interpolator, a position command value characteristic is
generated as the input value for the position loop from the preset
positioning data (effective target position, velocity, acceleration and jerk).
There are different forms of the "drive-controlled positioning" mode which
result in the corresponding diagnostic messages when the operating
mode was activated (see "Pertinent Diagnostic Messages").
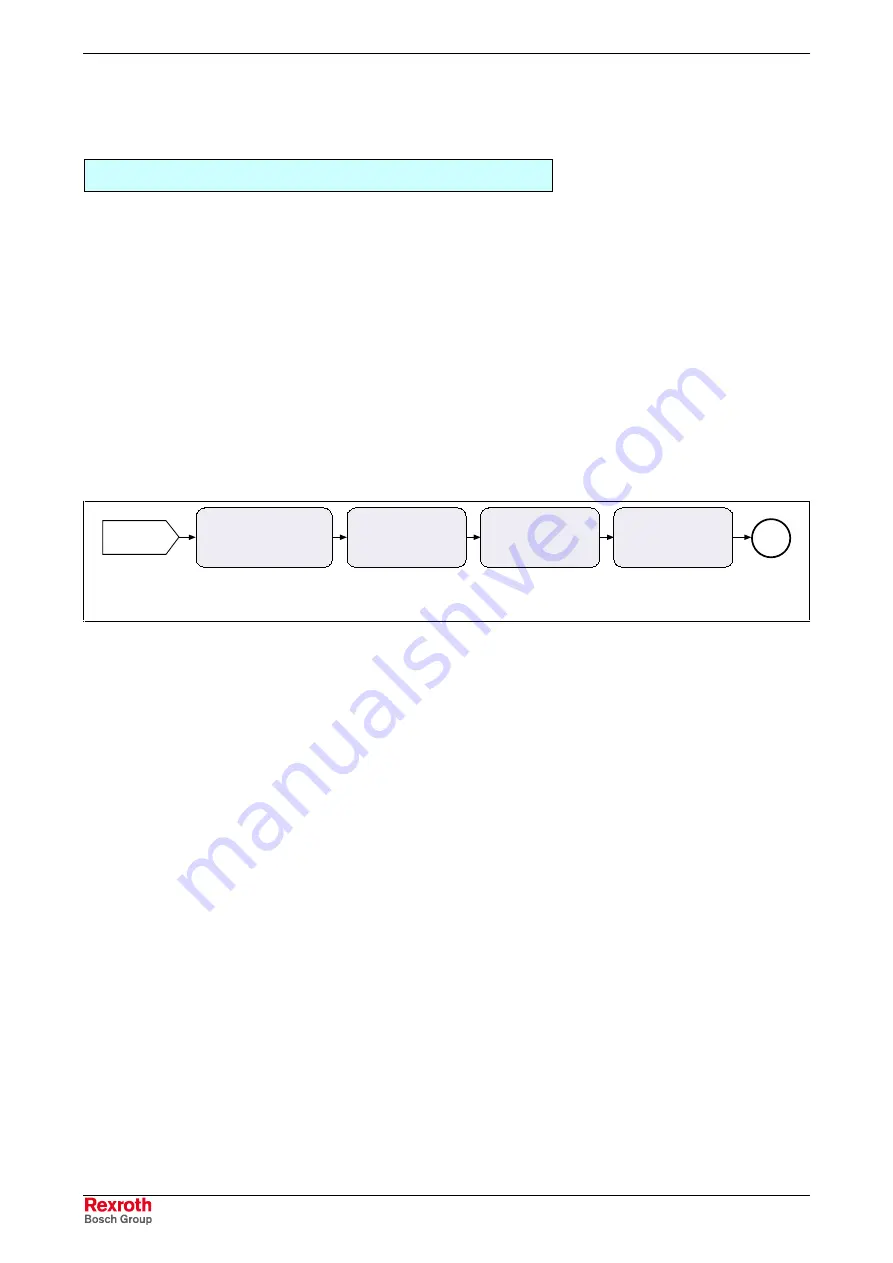
torque/force
command value
velocity
command value
effective
position command
value
positioning
cmd value
DF0056v1.fh7
M
command value
adjustment
for positioning
velocity loop
current loop
position loop
Fig. 7-16:
"Drive-controlled positioning" block diagram
•
processing of an absolute target position or a relative travel distance
•
drive-internal generation of a position command value profile for
moving to the target position
(
S-0-0258) specified by parameter
S-0-0282, Positioning command value
, complying with the
adjustable positioning velocity (S-0-0259) and positioning acceleration
(S-0-0260) or positioning deceleration (S-0-0359); can be set
separately
•
edge-controlled acceptance of the positioning command value via
toggle bit (S-0-0346, bit 0)
•
jerk limitation of the generated position command value with
parameter
S-0-0193, Positioning Jerk
•
evaluation of the positioning velocity with parameter
S-0-0108,
Feedrate override
•
monitoring the positioning velocity for exceeding parameter
S-0-0091,
Bipolar velocity limit value
•
monitoring the target position for observing the position limit values (cf.
S-0-0049, Positive position limit value
,
S-0-0050, Negative
position limit value
)
•
command value mode can be set in modulo format in parameter
S-0-0393, Command value mode
(shortest distance, positive only or
negative only direction, no reversal of direction of rotation)
•
position control with regard to
S-0-0051, Position feedback 1 value
(motor encoder) or
S-0-0053, Position feedback 2 value
[external
(load-side) encoder]
Features
Base package
of all variants in
closed-loop
characteristic
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































