





























7-16
Operating Modes
MPH-02, MPB-02, MPD-02
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
•
Bit 4 = 1
→
command value within masking window
The command value is within a masking window defined by the values
of P-0-1207 and P-0-1208 and prevents the drive from moving exactly
to this command value.
•
Bit 5 = 1
→
velocity ramp within masking window
The ramp generator goes through the range of a masking window, the
increased acceleration/deceleration according to P-0-1209 is active. In
addition to this message bit, either the bit "acceleration active" or
"deceleration active" is set.
Monitoring Functions
Monitoring functions specific to operating mode:
•
The effective velocity command value (sum of S-0-0036 and
S-0-0037) is limited to the value indicated in
S-0-0091, Bipolar
velocity limit value
. When the limitation takes effect, the drive
generates the message
E2059 Velocity command value limit active
.
•
The value of parameter
S-0-0036,
Velocity command value
is limited
to
S-0-
0091, Bipolar velocity limit value
. If the value in S-0-0036 is
higher than the value in S-0-0091, the
E2063 Velocity command
value > limit S-0-0091
warning is generated.
•
The drive monitors the correct function of the velocity loop and in the
case of fatal errors disables the drive torque with the error message
F8078 Speed loop error
.
•
The value of parameter
S-0-0040, Velocity feedback value
is
monitored. If it exceeds the 1.125-fold value parameterized in
S-0-0091, Bipolar velocity limit value
, the
F8079 Velocity limit S-0-
0091 exceeded
error message is generated.
7.4
Position Control with Cyclic Command Value Input
Brief Description
In the "position control" mode, a cyclic position command value is preset
for the drive in NC cycle time. This command value is fine interpolated in
the drive and jerk-limited via filters, if necessary, before being transmitted
to the position controller.
To minimize the lag error, variable acceleration feedforward is available in
addition to variable velocity feedforward.
There are different forms of the "position control" mode which result in the
corresponding diagnostic messages when the operating mode was
activated (see "Pertinent Diagnostic Messages").
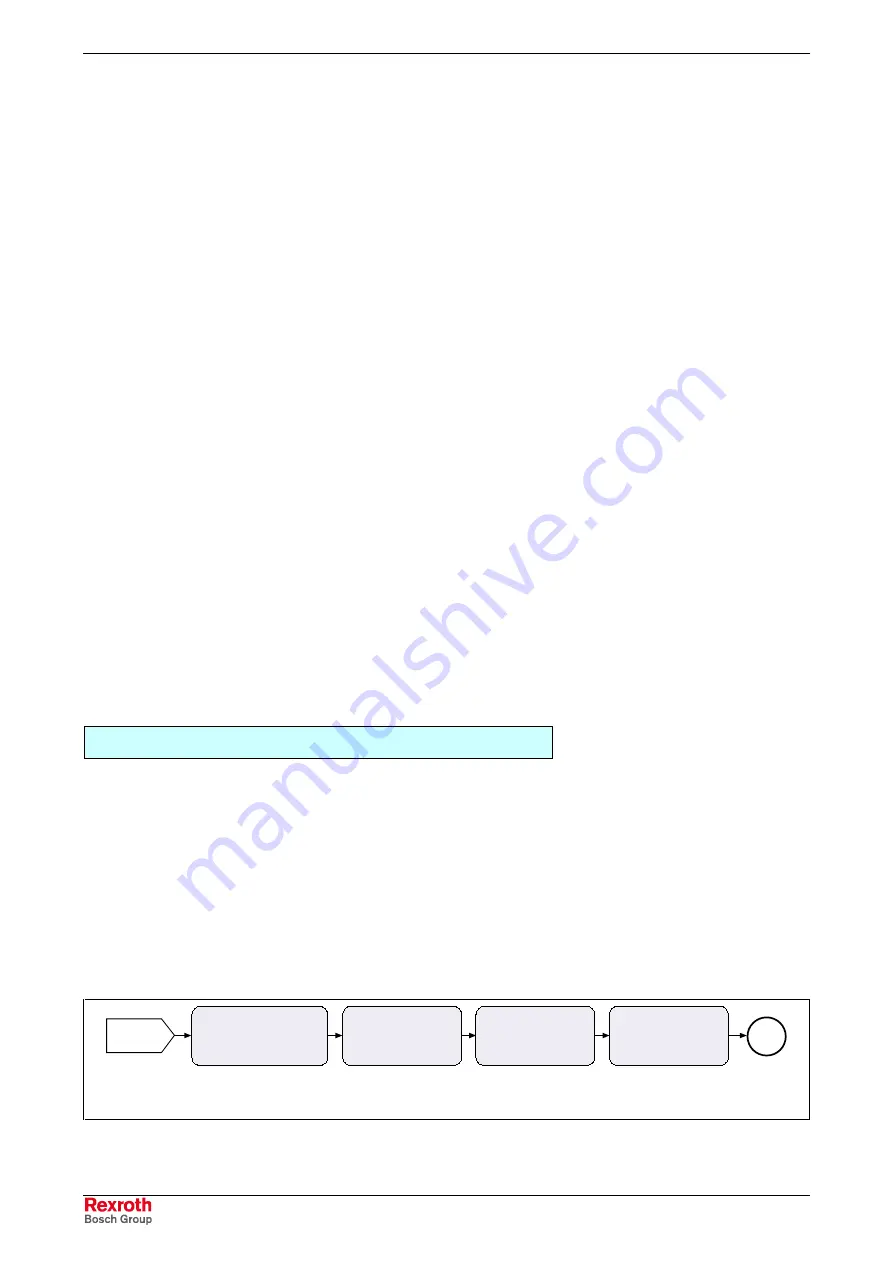
torque/force
command value
velocity command
value
effective
position command
value
DF0025v1.fh7
M
command value
processing for
position controller
velocity
controller
current controller
position
cmd value
position controller
Fig. 7-9:
"Position control with cyclic command value input" block diagram
E2059 Velocity command value
limit active
E2063 Velocity command value >
limit S-0-0091
F8078 Speed loop error
F8079 Velocity limit S-0-0091
exceeded
Base package
of all variants in
closed-loop
characteristic
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































