





























3. DISPLAY AND OPERATION SECTIONS
3 - 10
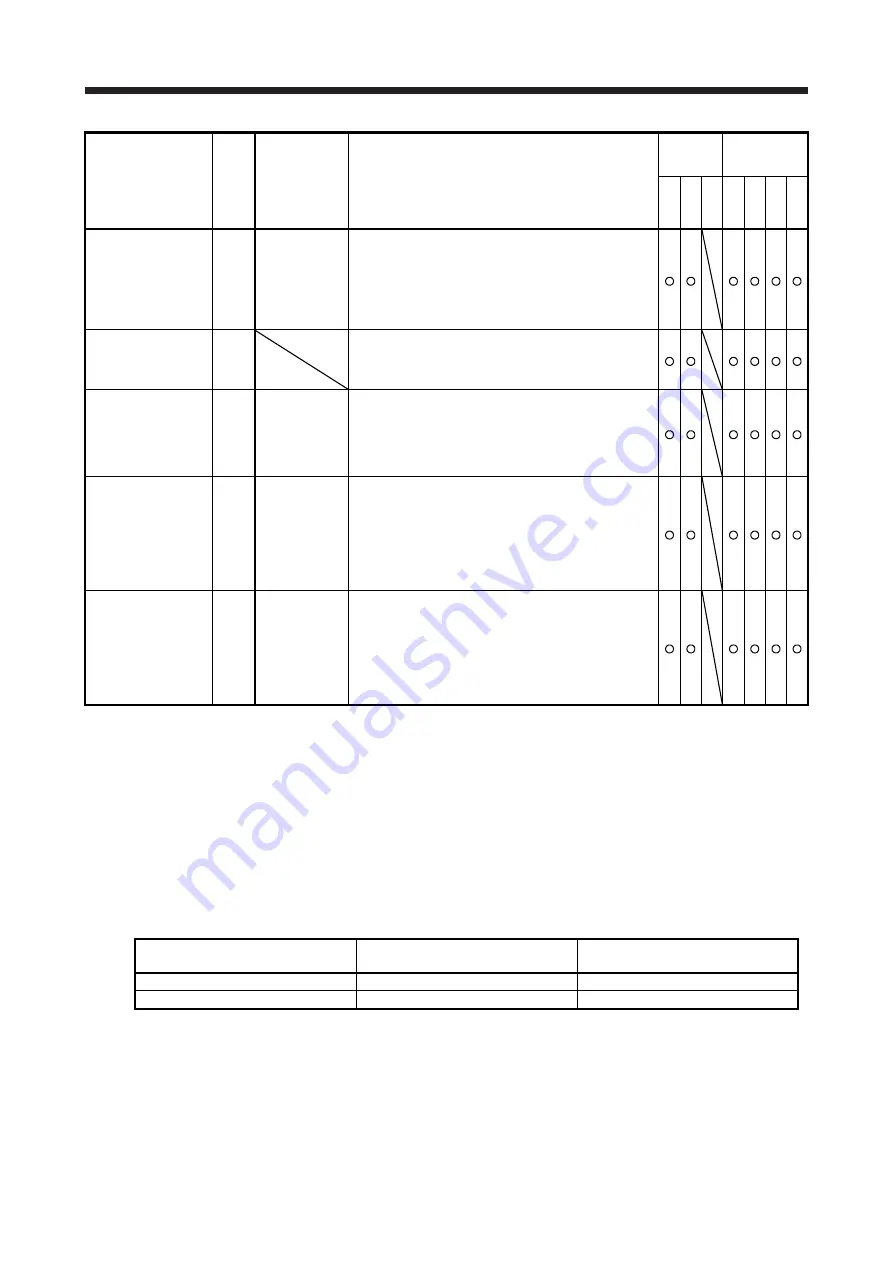
Status display
Symbol
Unit
Description
Control
mode
(Note 1)
Operation
mode (Note 3)
CP/BCD
CL
PS
Standard
Full.
Lin.
DD
Cam axis feed current
value
CCMd
10
STM
μ
m
10
(STM-4)
inch
10
-3
degree
pulse
(Note 2)
A feed current value during the cam axis control is displayed.
When the simple cam function is disabled, 0 is always
displayed.
The values in excess of ±99999 can be counted. However, the
counter shows only the lower five digits of the actual value since
the servo amplifier display is five digits.
Refer to section 12.1.8 for detecting point.
Cam No. in execution
Cno
Cam No. in execution is displayed.
When the simple cam function is disabled, 0 is always
displayed.
Refer to section 12.1.8 for detecting point.
Cam stroke amount in
execution
CSTK
10
STM
μ
m
10
(STM-4)
inch
10
-3
degree
pulse
(Note 2)
Cam stroke amount in execution is displayed. When the simple
cam function is disabled, 0 is always displayed.
The values in excess of ±99999 can be counted. However, the
counter shows only the lower five digits of the actual value since
the servo amplifier display is five digits.
Refer to section 12.1.8 for detecting point.
Main axis current value
MCMd
10
STM
μ
m
10
(STM-4)
inch
10
-3
degree
pulse
(Note 4)
A current value of the input axis (synchronous encoder axis or
servo input axis) is displayed. Unit is increment of input axis
position. When the simple cam function is disabled, 0 is always
displayed.
The values in excess of ±99999 can be counted. However, the
counter shows only the lower five digits of the actual value since
the servo amplifier display is five digits.
Refer to section 12.1.8 for detecting point.
Main axis one cycle
current value
MCyC
10
STM
μ
m
10
(STM-4)
inch
10
-3
degree
pulse
(Note 4)
The input travel amount of the input axis is displayed within the
range of "0 and (cam axis one cycle length setting - 1)". Unit is
an increment of cam axis one cycle. When the simple cam
function is disabled, 0 is always displayed.
The values in excess of ±99999 can be counted. However, the
counter shows only the lower five digits of the actual value since
the servo amplifier display is five digits.
Refer to section 12.1.8 for detecting point.
Note 1. CP: Positioning mode (point table method)
BCD: Positioning mode (point table method in the BCD input positioning operation)
This method is available only when the MR-D01 unit is connected. Refer to chapter 12 for details.
CL: Positioning mode (program method)
PS: Positioning mode (indexer method)
2. The unit can be selected from
μ
m/inch/degree/pulse with [Pr. PT01].
3. Standard: Standard (semi closed loop system) use of the rotary servo motor
Full.: Fully closed loop system use of the rotary servo motor
Lin.: Linear servo motor use
DD: Direct drive (DD) motor use
4. Depending on the setting of [Cam control data No. 30 Main shaft input axis selection], the parameters used to set the unit and
feed length multiplication will change as follows. For details of each parameter, refer to section 7.2.9 and 12.1.7 (3).
Setting of [Cam control data No. 30]
Parameter for the unit setting
Parameter for the feed length
multiplication setting
"0" or "1"
[Pr. PT01]
[Pr. PT03]
"2"
[Cam control data No. 14]
[Cam control data No. 14]
www.kavrammuhendislik.com.tr
Summary of Contents for MELSERVO MR-J4-03A6-RJ
Page 27: ...1 FUNCTIONS AND CONFIGURATION 1 12 MEMO www kavrammuhendislik com tr ...
Page 127: ...3 DISPLAY AND OPERATION SECTIONS 3 54 MEMO www kavrammuhendislik com tr ...
Page 275: ...5 HOW TO USE THE PROGRAM 5 68 MEMO www kavrammuhendislik com tr ...
Page 305: ...6 HOW TO USE INDEXER 6 30 MEMO www kavrammuhendislik com tr ...
Page 405: ...7 PARAMETERS 7 100 MEMO www kavrammuhendislik com tr ...
Page 419: ...8 TROUBLESHOOTING 8 14 MEMO www kavrammuhendislik com tr ...
Page 423: ...9 OPTIONS AND PERIPHERAL EQUIPMENT 9 4 MEMO www kavrammuhendislik com tr ...
Page 607: ...MEMO www kavrammuhendislik com tr ...







































































