





























1. FUNCTIONS AND CONFIGURATION
1 - 2
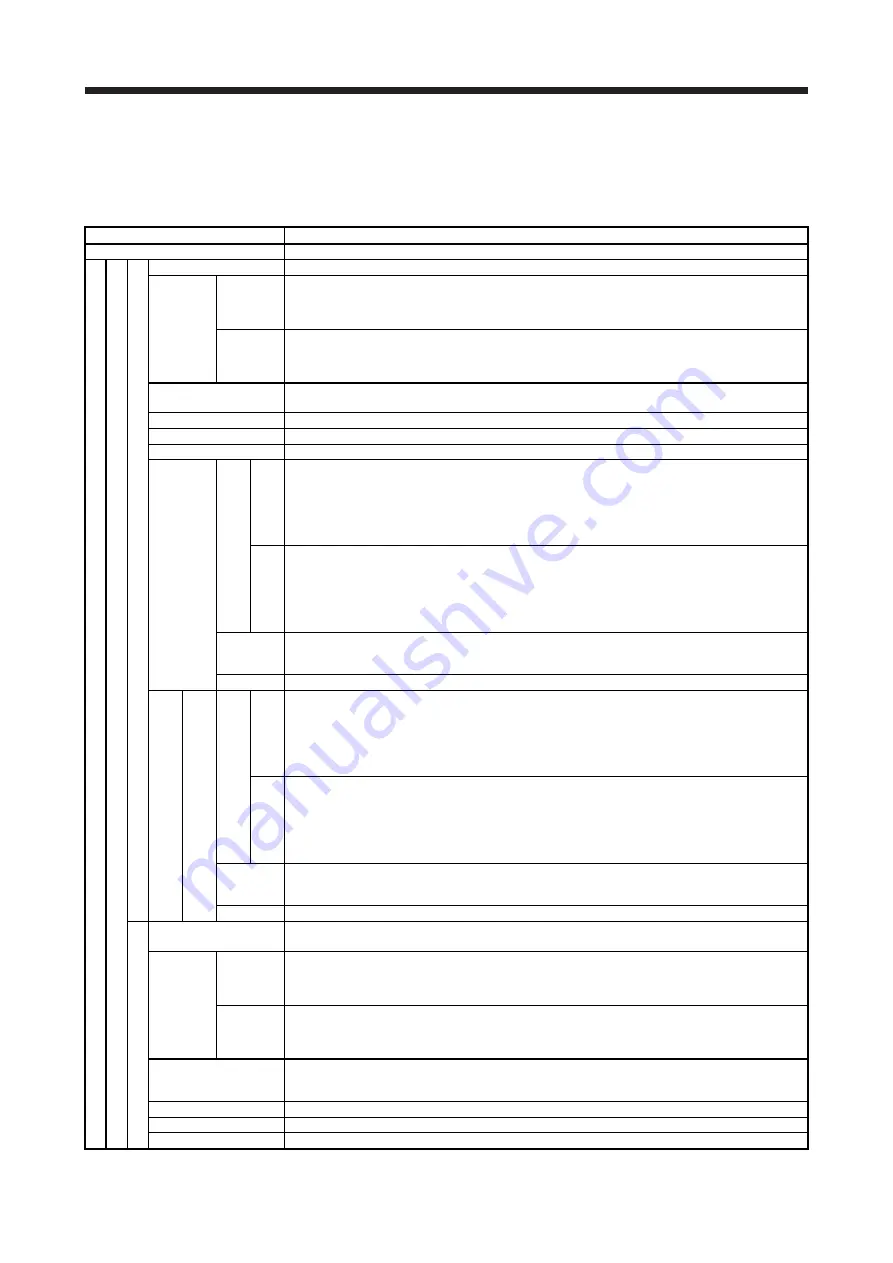
1.2 Positioning mode specification list
The specifications only of the positioning mode are listed here. For other specifications, refer to section 1.3
and 18.1.3 of "MR-J4-_A_(-RJ) Servo Amplifier Instruction Manual".
Item Description
Servo amplifier model
MR-J4-_A_-RJ 100 W or more/MR-J4-03A6-RJ
Positioning mode
Command method
Point table
Operational specifications
Positioning with specification of point table No. (255 points) (Note 6, 7)
Position
command
input
(Note 1)
Absolute
value
command
method
Set in the point table.
Setting range of feed length per point: -999999 to 999999 [×10
STM
μ
m],
-99.9999 to 99.9999 [×10
STM
inch], -999999 to 999999 [pulse],
Setting range of rotation angle: -360.000 to 360.000 [degree]
Incremental
value
command
method
Set in the point table.
Setting range of feed length per point: 0 to 999999 [×10
STM
μ
m],
0 to 99.9999 [×10
STM
inch], 0 to 999999 [pulse],
Setting range of rotation angle: 0 to 999.999 [degree]
Speed command input
Set the acceleration/deceleration time constants in the point table.
Set the S-pattern acceleration/deceleration time constants with [Pr. PC03].
System
Signed absolute value command method/incremental value command method
Analog override
0 V DC to ±10 V DC/0% to 200%
Torque limit
Set with parameter or external analog input (0 V DC to +10 V DC/maximum torque)
BCD input
Position command input (Note 1)
Absolute value command method
Signed 6-digit BCD digital switch or contact input
Setting range of feed length: -999999 to 999999 [×10
STM
μ
m],
-99.9999 to 99.9999 [×10
STM
inch], -999999 to 999999 [pulse],
Setting range of rotation angle: -360.000 to 360.000 [degree]
Incremental value command method
Signed 6-digit BCD digital switch or contact input
Setting range of feed length: 0 to 999999 [×10
STM
μ
m],
0 to 99.9999 [×10
STM
inch], 0 to 999999 [pulse],
Setting range of rotation angle: 0 to 999.999 [degree]
Speed
command
input
Selects the rotation speeds and acceleration/deceleration times of
the point table No. 1 to 15 by a contact input.
Set the S-pattern acceleration/deceleration time constants with [Pr. PC03].
System
Signed absolute value command method/incremental value command method
Position command data input
RS-422/RS-485 communication (Note 5)
Position command input (Note 1)
Absolute value command method
Setting of position command data with RS-422/RS-485 communication
Setting range of feed length per point: -999999 to 999999 [×10
STM
μ
m],
-99.9999 to 99.9999 [×10
STM
inch], -999999 to 999999 [pulse],
Setting range of rotation angle: -360.000 to 360.000 [degree]
Incremental value command method
Setting of position command data with RS-422/RS-485 communication
Setting range of feed length per point: 0 to 999999 [×10
STM
μ
m],
0 to 99.9999 [×10
STM
inch], 0 to 999999 [pulse],
Setting range of rotation angle: 0 to 999.999 [degree]
Speed
command
input
Selects the rotation speed and acceleration/deceleration time constant
through RS-422/RS-485 communication.
Set the S-pattern acceleration/deceleration time constants with [Pr. PC03].
System
Signed absolute value command method/incremental value command method
Program
Operational specifications
Program language (program with MR Configurator2)
Program capacity: 640 steps (256 programs)
Position
command
input
(Note 1)
Absolute
value
command
method
Set with program language.
Setting range of feed length: -999999 to 999999 [×10
STM
μ
m],
-99.9999 to 99.9999 [×10
STM
inch], -999999 to 999999 [pulse],
Setting range of rotation angle: -360.000 to 360.000 [degree]
Incremental
value
command
method
Set with program language.
Setting range of feed length: -999999 to 999999 [×10
STM
μ
m],
-99.9999 to 99.9999 [×10
STM
inch], -999999 to 999999 [pulse],
Setting range of rotation angle: -999.999 to 999.999 [degree]
Speed command input
Set servo motor speed, acceleration/deceleration time constants,
and S-pattern acceleration/deceleration time constants with program language.
S-pattern acceleration/deceleration time constants are also settable with [Pr. PC03].
System
Signed absolute value command method/signed incremental value command method
Analog override
Set with external analog input (0 V DC to ±10 V DC/0% to 200%)
Torque limit
Set with parameter or external analog input (0 V DC to +10 V DC/maximum torque)
www.kavrammuhendislik.com.tr
Summary of Contents for MELSERVO MR-J4-03A6-RJ
Page 27: ...1 FUNCTIONS AND CONFIGURATION 1 12 MEMO www kavrammuhendislik com tr ...
Page 127: ...3 DISPLAY AND OPERATION SECTIONS 3 54 MEMO www kavrammuhendislik com tr ...
Page 275: ...5 HOW TO USE THE PROGRAM 5 68 MEMO www kavrammuhendislik com tr ...
Page 305: ...6 HOW TO USE INDEXER 6 30 MEMO www kavrammuhendislik com tr ...
Page 405: ...7 PARAMETERS 7 100 MEMO www kavrammuhendislik com tr ...
Page 419: ...8 TROUBLESHOOTING 8 14 MEMO www kavrammuhendislik com tr ...
Page 423: ...9 OPTIONS AND PERIPHERAL EQUIPMENT 9 4 MEMO www kavrammuhendislik com tr ...
Page 607: ...MEMO www kavrammuhendislik com tr ...






































































