





























7. PARAMETERS
7 - 69
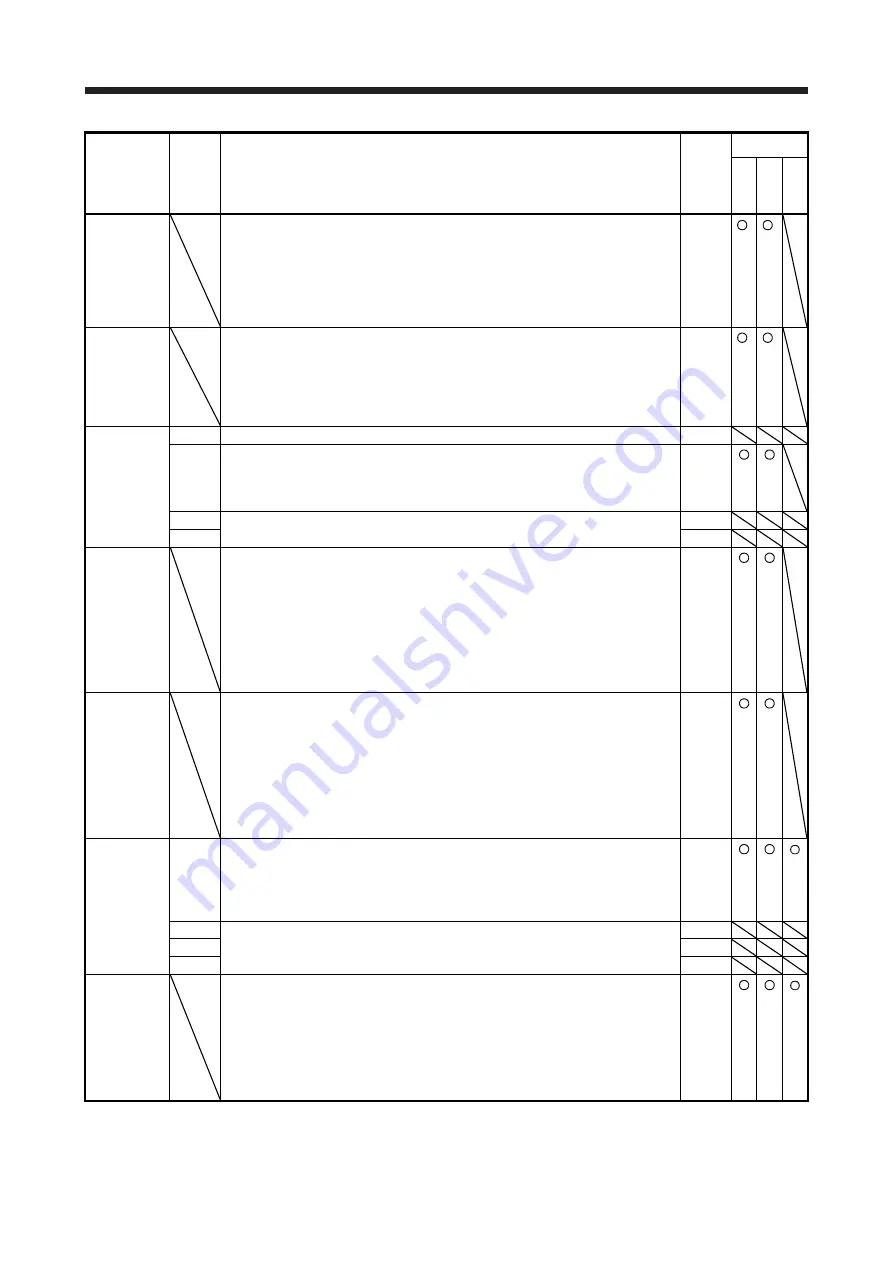
No./
symbol/name
Setting
digit
Function
Initial
value
[unit]
Control mode
CP/BCD
CL
PS
PE07
BC2
Fully closed
loop control -
Position
deviation error
detection level
Set [AL. 42.8 Fully closed loop control error by position deviation] of the fully closed
loop control error detection. When the position deviation between the servo motor
encoder and load-side encoder becomes larger than the setting value, the alarm will
occur.
This parameter is not available with MR-J4-03A6-RJ servo amplifiers.
Setting range: 1 to 20000
100
[kpulse]
PE08
DUF
Fully closed
loop dual
feedback filter
Set a dual feedback filter band.
For details, refer to section 17.3.1 (5) of "MR-J4-_A_(-RJ) Servo Amplifier Instruction
Manual".
This parameter is not available with MR-J4-03A6-RJ servo amplifiers.
Setting range: 1 to 4500
10
[rad/s]
PE10
FCT3
Fully closed
loop function
selection 3
_ _ _ x For manufacturer setting
0h
_ _ x _ Fully closed loop control - Position deviation error detection level - Unit selection
0: 1 kplulse unit
1: 1 pulse unit
This digit is not available with MR-J4-03A6-RJ servo amplifiers.
0h
_ x _ _ For manufacturer setting
0h
x _ _ _
0h
PE34
*FBN2
Fully closed
loop control -
Feedback
pulse
electronic gear
2 - Numerator
Set a numerator of electronic gear for the servo motor encoder pulse at the fully closed
loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one
servo motor revolution is converted to the resolution of the load-side encoder.
For details, refer to section 17.3.1 (5) of "MR-J4-_A_(-RJ) Servo Amplifier Instruction
Manual".
This parameter is not available with MR-J4-03A6-RJ servo amplifiers.
Setting range: 1 to 65535
1
PE35
*FBD2
Fully closed
loop control -
Feedback
pulse
electronic
gear 2 -
Denominator
Set a denominator of electronic gear for the servo motor encoder pulse at the fully
closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one
servo motor revolution is converted to the resolution of the load-side encoder.
For details, refer to section 17.3.1 (5) of "MR-J4-_A_(-RJ) Servo Amplifier Instruction
Manual".
This parameter is not available with MR-J4-03A6-RJ servo amplifiers.
Setting range: 1 to 65535
1
PE41
EOP3
Function
selection E-3
_ _ _ x Robust filter selection
0: Disabled
1: Enabled
When you select "Enabled" of this digit, the machine resonance suppression filter 5
set in [Pr. PB51] is not available.
0h
_ _ x _ For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
PE44
LMCP
Lost motion
compensation
positive-side
compensation
value
selection
Set the lost motion compensation for when reverse rotation (CW) switches to forward
rotation (CCW) in increments of 0.01% assuming the rated torque as 100%.
This parameter is available with servo amplifiers with software version B4 or later.
Setting range: 0 to 30000
0
[0.01%]
www.kavrammuhendislik.com.tr
Summary of Contents for MELSERVO MR-J4-03A6-RJ
Page 27: ...1 FUNCTIONS AND CONFIGURATION 1 12 MEMO www kavrammuhendislik com tr ...
Page 127: ...3 DISPLAY AND OPERATION SECTIONS 3 54 MEMO www kavrammuhendislik com tr ...
Page 275: ...5 HOW TO USE THE PROGRAM 5 68 MEMO www kavrammuhendislik com tr ...
Page 305: ...6 HOW TO USE INDEXER 6 30 MEMO www kavrammuhendislik com tr ...
Page 405: ...7 PARAMETERS 7 100 MEMO www kavrammuhendislik com tr ...
Page 419: ...8 TROUBLESHOOTING 8 14 MEMO www kavrammuhendislik com tr ...
Page 423: ...9 OPTIONS AND PERIPHERAL EQUIPMENT 9 4 MEMO www kavrammuhendislik com tr ...
Page 607: ...MEMO www kavrammuhendislik com tr ...







































































