





























595
Changing to CS1W/CJ1W-NC271/471/F71 from CS1W/CJ1W-NC113/133/213/233/413/433
Appendix E
Origin Search High Speed
The origin search high speed (speed until detection of the origin proximity input signal) is set in the axis param-
eters in earlier PCUs. In the CS1W/CJ1W-NC271/471/F71, however, this parameter value is set as the
Speed
Command Value
for origin searches in the Axis Operating Output Memory Area when the origin search is
started.
Origin Search Proximity Speed
The origin search proximity speed (speed after detection of the origin proximity input signal until detection of
the origin input signal) is set in the axis parameters in earlier PCUs. In the CS1W/CJ1W-NC271/471/F71, how-
ever, this parameter value is set as the
Zero Point Return Approach Speed 1
(Pn817) in the Servo Parameter
Area.
The setting unit for the
Zero Point Return Approach Speed 1
parameter is 100 command units/s. Therefore, to
set the command unit to pulses, the set value for earlier PCUs must be multiplied by 1/100 to obtain the set
value required for CS1W/CJ1W-NC271/471/F71 PCUs.
Origin Compensation
When using origin compensation in earlier PCUs, positioning was executed for the amount of origin compensa-
tion data at the origin search proximity speed. This operation is performed after first stopping the search oper-
ation using origin input signal detection.
For CS1W/CJ1W-NC271/471/F71 PCUs, origin compensation is performed following origin input signal detec-
tion by executing positioning using the Servo Parameters
Zero Point Return Approach Speed 2
(Pn818) and
Final Travel Distance to Return to Zero Point
(Pn819).
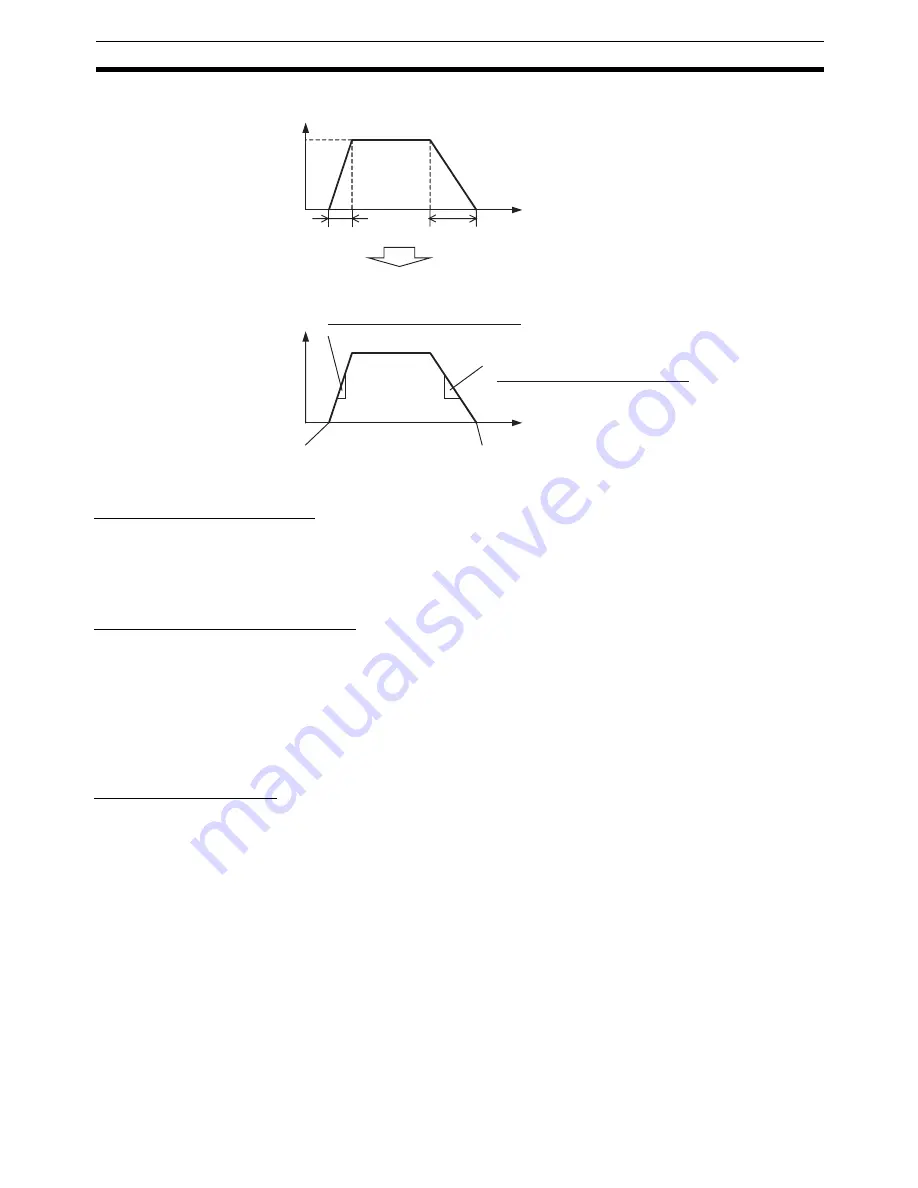
CS1W/CJ1W-NC113/133/213/233/413/433
Speed
Speed
Maximum speed
(pulses/s)
Initial speed = 0
(pulses/s)
Origin search acceleration time (ms)
Origin search deceleration time (ms)
Time
Time
CS1W/CJ1W-NC271/471/F71
Pn80B (second-step linear acceleration constant)
Maximum speed
−
Initial speed (0)
Origin search acceleration time
×
10
(
×
10,000 pulses/s
2
)
=
Pn80E (second-step linear deceleration constant)
=
Maximum speed
−
Initial speed (0)
Origin search deceleration time
×
10
(
×
10,000 pulses/s
2
)
Pn80C (acceleration constant switching speed) = 0
Pn80F (deceleration constant switching speed) = 0
Summary of Contents for CJ1W-MA - REV 10-2008
Page 3: ...iv ...
Page 5: ...vi ...
Page 21: ...xxii ...
Page 57: ...30 Starting Operation Section 2 2 ...
Page 97: ...70 Wiring Section 3 4 ...
Page 247: ...220 Transferring Servo Parameters Section 5 3 ...
Page 281: ...254 Standard Settings for Servo Drives Using MECHATROLINK Section 6 4 ...
Page 343: ...316 Absolute Encoder Origin Section 8 6 ...
Page 375: ...348 Linear Interpolation Section 9 7 ...
Page 423: ...396 DEVIATION COUNTER RESET Section 10 10 ...
Page 631: ...604 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 641: ...614 Index ...
Page 643: ...616 Revision History ...





















































