





























313
Absolute Encoder Origin
Section 8-6
8-6-6
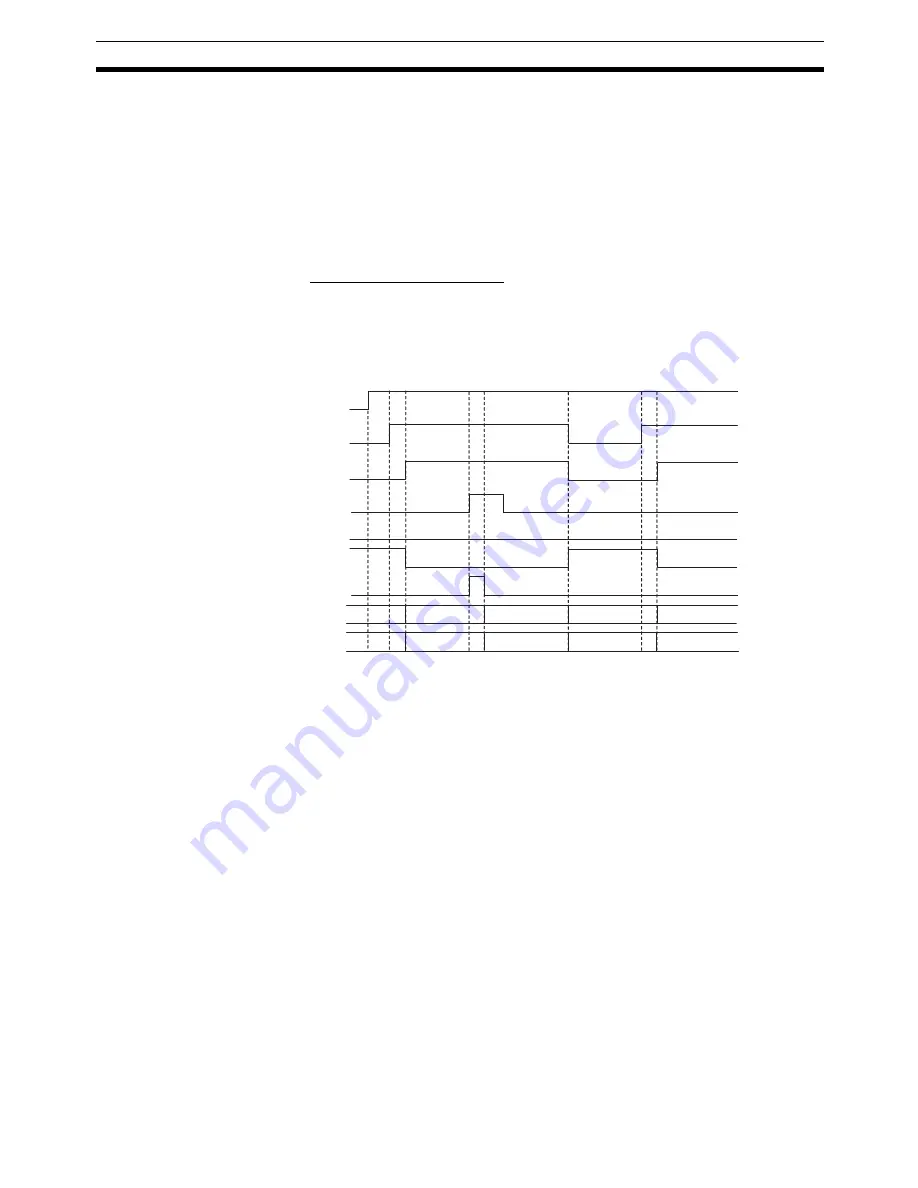
Establishing the Origin Using an Absolute Encoder
The Position Control Unit establishes the origin by reading the absolute value
data saved in the absolute encoder using the following timing.
The zero point position offset that is set as a Servo parameter is added to the
absolute value data that is read and input to the Axis Operating Input Memory
Areas as the present position of the Position Control Unit.
In the following sections, the present position is given as the sum of the travel
distances for the operations for each axis.
G-series Servo Drives
Turning ON the Servo Drive
When the control power supply is turned ON, the G-series Servo Drive reads
the absolute value data of the Servomotor with the absolute encoder to the
Servo Drive. When MECHATROLINK communications start (i.e., when a con-
nection is established), the Position Control Unit updates the present position
using the absolute value data read from the Servo Drive.
Servo Drive Power Supply Input
CONNECT Bit (word n+1, bit 00)
Connection Status Flag (word n+16, bit 15)
Present Position Preset (word a, bit 08)
Positioning Completed (word b, bit 05)
No Origin Flag (word b, bit 06)
Busy Flag (word b, bit 13)
Feedback Present Position (words b+6, b+7)
Command Present Position (words b+8, b+9)
Preset data
Preset data
Preset data
(See note.)
The present position data will be read from the
Servo Drive and the origin will be established when
CONNECTION Bit is set and the MECHATROLINK
is in communications status (the Connection Status
Flag is ON).
The origin will not be established (the No Origin Flag
will be ON) and the present position will become
invalid data when CONNECTION Bit is set and
MECHATROLINK communications are stopped (the
Connection Status Flag is OFF).
Note:
Once the Present Position
Preset has been executed,
the preset data will be read
when the connection is
established until the absolute
value data is read again.
n = Beginning word of Common Operating Memory Area: n = 1500 + (unit number
×
25)
b = Beginning word of Axis Operating Input Memory Areas specified in Common Para (Axis No.
−
1)
×
25
Absolute
value data
Absolute
value data
Position data
invalid
Position data
invalid
Preset data
(See note.)
Summary of Contents for CJ1W-MA - REV 10-2008
Page 3: ...iv ...
Page 5: ...vi ...
Page 21: ...xxii ...
Page 57: ...30 Starting Operation Section 2 2 ...
Page 97: ...70 Wiring Section 3 4 ...
Page 247: ...220 Transferring Servo Parameters Section 5 3 ...
Page 281: ...254 Standard Settings for Servo Drives Using MECHATROLINK Section 6 4 ...
Page 343: ...316 Absolute Encoder Origin Section 8 6 ...
Page 375: ...348 Linear Interpolation Section 9 7 ...
Page 423: ...396 DEVIATION COUNTER RESET Section 10 10 ...
Page 631: ...604 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 641: ...614 Index ...
Page 643: ...616 Revision History ...





















































