





























271
Limit Input Operations
Section 7-5
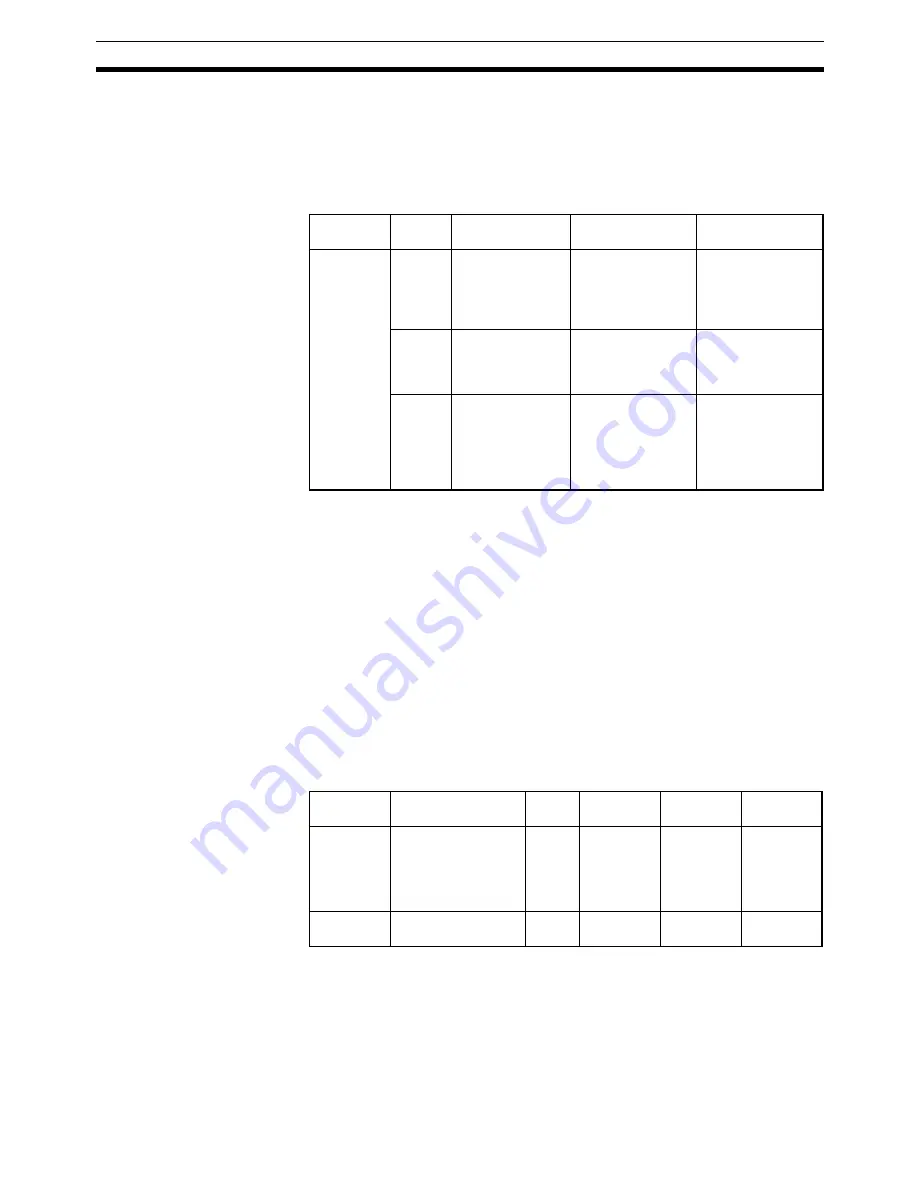
Pn066 is used to set the stop operation of the Servomotor when a for-
ward/reverse rotation limit is input or a forward/reverse software limit is
reached. The parameter size of Pn066 is the value to be specified when trans-
ferring the Servo Parameter Pn066 including the above settings.
The following table shows the Servomotor stop operations using Pn066 set-
tings.
Note
(1) If an operation command in the drive prohibited direction is received
when the torque command of the drive prohibited direction is disabled,
the Servomotor will not operate in the drive-prohibited direction, but the
position deviation will accumulate because the torque command is en-
abled. If drive prohibition is detected, stop the operation command from
the host controller and take measures such as executing a command in
the reverse direction.
(2) The positioning command generation process (positioning operation)
within the Servo Drive will be forcibly stopped after it enters the deceler-
ation mode. Also, when the deceleration mode is activated during speed
control or torque control, it will switch to position control.
(3) When the Servomotor rotation speed is 30 r/min or less (stopped), the de-
celeration mode will not be entered even if the drive prohibit input is en-
abled.
W-series and SMARTSTEP Junior Limit Input Parameters
Note
The Pn406 default setting corresponds to that used for W-series Servo Drives.
Pn001.1 is used to set the stop operation of the Servomotor when a for-
ward/reverse rotation limit input is input or a forward/reverse software limit is
reached. The parameter size of Pn001.1 in the above table is the set value to
be specified when transferring the Servo Parameter Pn001 (including
Pn001.1).
Parameter
No.
Setting
During
deceleration
After stopping
Deviation counter
Pn066
0
Dynamic brake
Disables torque
command in drive
prohibited direction
Cleared while
decelerating with
dynamic brake.
Retained after
stopping.
1
Disables torque
Disables torque
command in drive
prohibited direction
Cleared while
decelerating.
Retained after
stopping.
2
Emergency stop
torque (Pn06E)
Servo lock
Retained while
decelerating,
cleared upon com-
pletion of decelera-
tion, and retained
after stopping.
Parameter
No.
Parameter name
Unit
Setting
range
Parameter
size
Default
setting
Pn001.1
Function selection
application switch 1
Select stop when
prohibited drive is
input
---
0 to 2
2
0
Pn406
Emergency stop
torque
%
0 to 800
2
350
Summary of Contents for CJ1W-MA - REV 10-2008
Page 3: ...iv ...
Page 5: ...vi ...
Page 21: ...xxii ...
Page 57: ...30 Starting Operation Section 2 2 ...
Page 97: ...70 Wiring Section 3 4 ...
Page 247: ...220 Transferring Servo Parameters Section 5 3 ...
Page 281: ...254 Standard Settings for Servo Drives Using MECHATROLINK Section 6 4 ...
Page 343: ...316 Absolute Encoder Origin Section 8 6 ...
Page 375: ...348 Linear Interpolation Section 9 7 ...
Page 423: ...396 DEVIATION COUNTER RESET Section 10 10 ...
Page 631: ...604 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 641: ...614 Index ...
Page 643: ...616 Revision History ...





















































