





























258
Control Units
Section 7-2
Command Unit Setting
Example
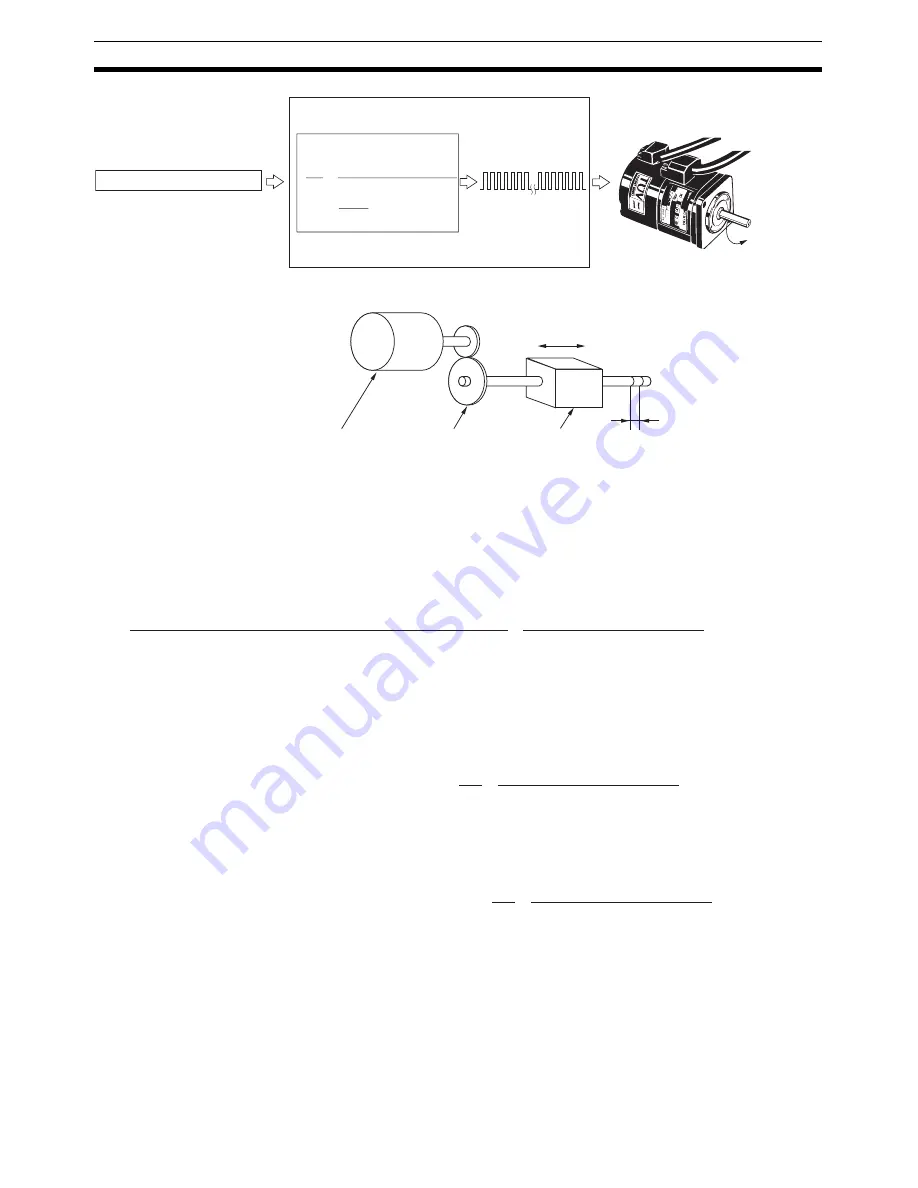
Consider the following positioning example.
The equation for calculating the distance traveled per Servomotor encoder
resolution pulse is as follows:
The Servo Drive performs control internally at four times the Servomotor's
encoder resolution. Therefore, in the above equation, the Servomotor's
encoder resolution is multiplied by four. If the command unit used is mm, the
electronic gear ratio is set as the reciprocal of the above equation and G1/G2
is set as follows:
If the command unit used is 0.01 mm (= 10
µ
m), the unit is converted by mul-
tiplying the travel distance per encoder resolution pulse by 100, and the elec-
tronic gear ratio is set as follows:
7-2-2
Control Units for Speed/Torque Control
The unit used for the speed command value in speed control is the percent-
age (unit: 0.001%) of the Servo Drive’s/Servomotor's momentary maximum
rotation speed. The unit used for the torque command value in torque control
is the percentage (unit: 0.001%) of the Servo Drive’s/Servomotor's momen-
tary maximum torque. The Servomotor's momentary maximum rotation speed
and momentary maximum torque depend on the Servomotor model.
G1
Encoder resolution
×
4
G2 Command unit
8192
1000
Servomotor
(Encoder resolution; 2,048 pulses/rotation)
1 rotation (8,192 pulses)
8,192 pulses
Electronic gear
=
=
Servo Drive
Position command value: 1,000
(command unit)
Servomotor
N
V
M
M: Deceleration gear ratio
V: Feed speed of object being positioned (mm/s)
P: Feed screw pitch (mm/rotation)
R: Servomotor encoder resolution (pulses/rotation)
P
Electronic gear ratio
Object being
positioned
Feed screw pitch
Feed screw pitch
(Servomotor encoder resolution
×
4)
×
(deceleration ratio)
=
P (mm/rotation)
R (pulses/rotation)
×
4
×
M
(mm/pulse)
G1
G2
=
P (mm/rotation)
R (pulses/rotation)
×
4
×
M
(pulses/mm)
Command unit (mm):
G1
G2
=
P (mm/rotation)
×
100
R (pulses/rotation)
×
4
×
M
(pulses/0.01 mm)
Command unit (0.01 mm):
Summary of Contents for CJ1W-MA - REV 10-2008
Page 3: ...iv ...
Page 5: ...vi ...
Page 21: ...xxii ...
Page 57: ...30 Starting Operation Section 2 2 ...
Page 97: ...70 Wiring Section 3 4 ...
Page 247: ...220 Transferring Servo Parameters Section 5 3 ...
Page 281: ...254 Standard Settings for Servo Drives Using MECHATROLINK Section 6 4 ...
Page 343: ...316 Absolute Encoder Origin Section 8 6 ...
Page 375: ...348 Linear Interpolation Section 9 7 ...
Page 423: ...396 DEVIATION COUNTER RESET Section 10 10 ...
Page 631: ...604 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 641: ...614 Index ...
Page 643: ...616 Revision History ...





















































