





























378
Torque Control
Section 10-6
The command present position that is output during torque control is calcu-
lated from the feedback position and the position deviation that is inferred
from the current speed.
Changes in output torque may affect operation when switching to speed con-
trol or position control with deceleration stop, while torque control is being per-
formed. For details, refer to
10-5-3 Switching Control Mode
.
Note
When executing movement commands sequentially, make sure that the
movement command bit remains OFF for a minimum of either the PLC cycle
time × 2 or the MECHATROLINK communications cycle × 2, whichever is
longer. If the time that the movement command bit is OFF is too short, the
PCU will not be able to detect the rising edge of the movement command bit,
preventing reception of the command.
Option Command Value during Torque Control
A speed limit can be applied during torque control by setting Servo Parameter
Speed Limit Selection
(Pn05B) when using G-series Servo Drives, and the
Speed Command Input Change
in Servo Parameter
Function Selection Appli-
cation Switch 2
(Pn002.1) when using W-series Servo Drives and the option
command value.
The speed limit functions depend on the Servo Parameter and output bit com-
binations, as follows:
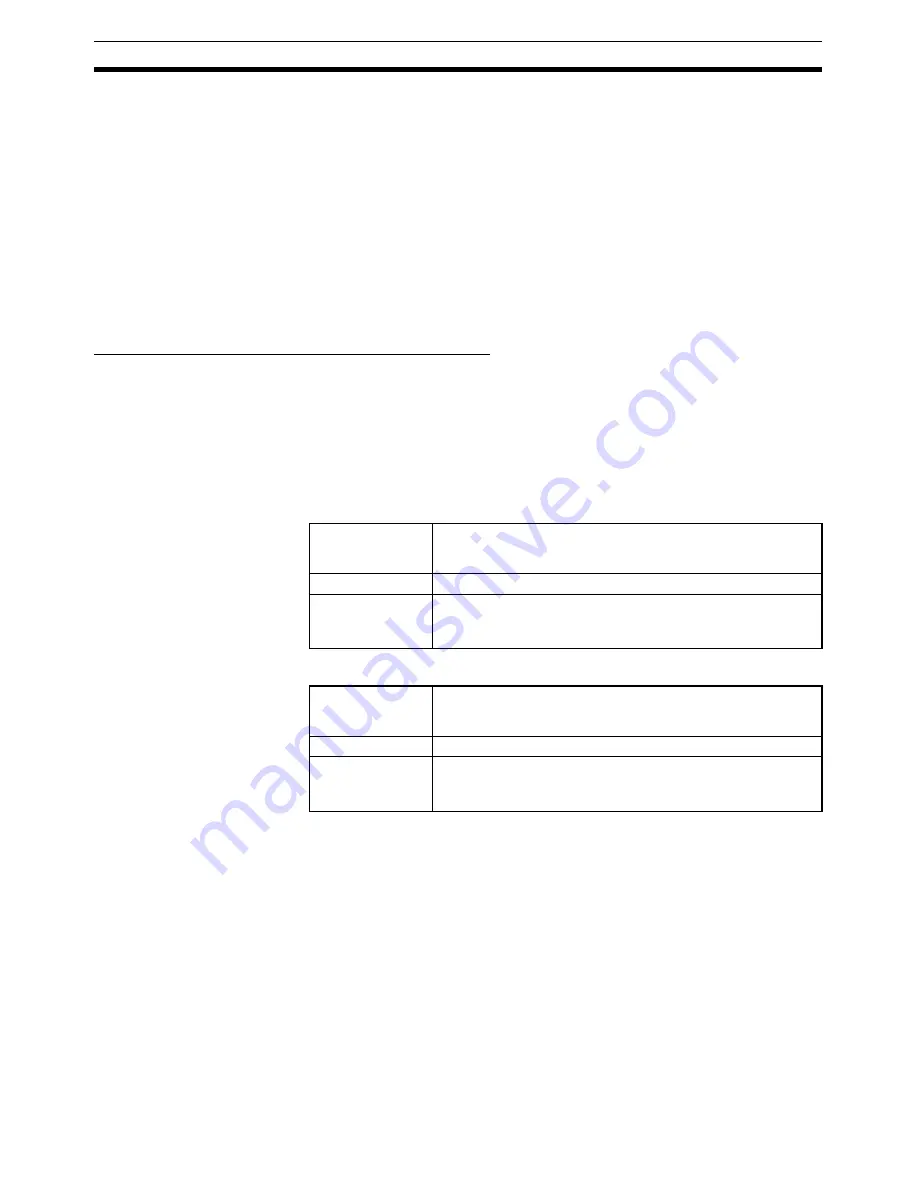
G-series Servo Drives
W-series Servo Drives
The data for option command value 1 (speed limit value) is enabled when the
bit for TORQUE CONTROL turns ON. Changing option command value 1
while torque control is being executed and then turning ON the TORQUE
CONTROL Bit again enables the speed limit value to be changed during oper-
ation.
The speed limit for torque control set in the option command value can be
used together with a Servo Parameter (Pn053 for the G Series and Pn407 for
the W Series) (speed limit). When both speed limit functions are enabled at
the same time, the Servomotor's rotation speed is limited by the lowest speed
limit setting.
Note
The speed limit functions for torque control are used to limit the Servomotor's
rotation speed in a steady state, and not the upper limit (maximum value) of
the Servomotor's rotation speed. Transitional overshooting may occur in the
Servomotor's rotation speed and the speed limit value may be exceeded due
Speed command
input change
(Pn05B)
Function
0
Option command values 1 and 2 are disabled. Use set value 0.
1
Limits speed during torque control, using option command value
1 (words a+10, a+11) as the speed limit value.
Option command value 2 is not used. Use set value 0.
Speed command
input change
(Pn002.1)
Function
0
Option command values 1 and 2 are disabled. Use set value 0.
1
Limits speed during torque control, using option command value
1 (words a+10, a+11) as the speed limit value.
Option command value 2 is not used. Use set value 0.
Summary of Contents for CJ1W-MA - REV 10-2008
Page 3: ...iv ...
Page 5: ...vi ...
Page 21: ...xxii ...
Page 57: ...30 Starting Operation Section 2 2 ...
Page 97: ...70 Wiring Section 3 4 ...
Page 247: ...220 Transferring Servo Parameters Section 5 3 ...
Page 281: ...254 Standard Settings for Servo Drives Using MECHATROLINK Section 6 4 ...
Page 343: ...316 Absolute Encoder Origin Section 8 6 ...
Page 375: ...348 Linear Interpolation Section 9 7 ...
Page 423: ...396 DEVIATION COUNTER RESET Section 10 10 ...
Page 631: ...604 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 641: ...614 Index ...
Page 643: ...616 Revision History ...





















































