





























763
Data Control Instructions
Section 3-18
PID Parameter Settings
Control
data
Item
Contents
Setting range
Change with
ON input
condition
C
Set value (SV)
The target value of the process
being controlled.
Binary data (of the same number
of bits as specified for the input
range)
Allowed
C+1
Proportional band
The parameter for P action
expressing the proportional con-
trol range/total control range.
0001 to 270F hex (1 to 9999);
(0.1% to 999.9%, in units of
0.1%)
Can be
changed with
input condition
ON if bit 1 of
C+5 is 1.
C+2
Tik
Integral Constant
A constant expressing the
strength of the integral action. As
this value increases, the integral
strength decreases.
0001 to 1FFF hex (1 to 8191);
(9999 = Integral operation not
executed) (See note 1.)
C+3
Tdk
Derivative Constant
A constant expressing the
strength of the derivative action.
As this value increases, the
derivative strength decreases.
0001 to 1FFF hex (1 to 8191);
(0000 = Derivative operation not
executed) (See note 1.)
C+4
Sampling period (
τ
)
Sets the period for executing the
PID action.
0001 to 270F hex (1 to 9999);
(0.01 to 99.99 s, in units of
10 ms)
Not allowed
Bits 04 to 15
of C+5
2-PID parameter (
α
) The input filter coefficient. Nor-
mally use 0.65 (i.e., a setting of
000). The filter efficiency
decreases as the coefficient
approaches 0.
000 hex:
α
= 0.65
Setting from 100 to 163 hex
means that the value of the right-
most two digits is set from
α
=
0.00 to
α
= 0.99. (See note 2.)
Bit 03 of C+5 Manipulated vari-
able output designa-
tion
Designates the manipulated vari-
able output when the PV equals
the SV.
Note This setting is enabled
when there is no integral
operation.
0: Output 0%
1: Output 50%
Bit 01 of C+5 PID constant
change enable set-
ting
The timing of enabling changes
made to the proportional band
(P), integral constant (Tik), and
derivative constant (Tdk) for use
in PID calculations.
0: At start of PID instruction exe-
cution
1: At start of PID instruction exe-
cution and each sampling period
Allowed
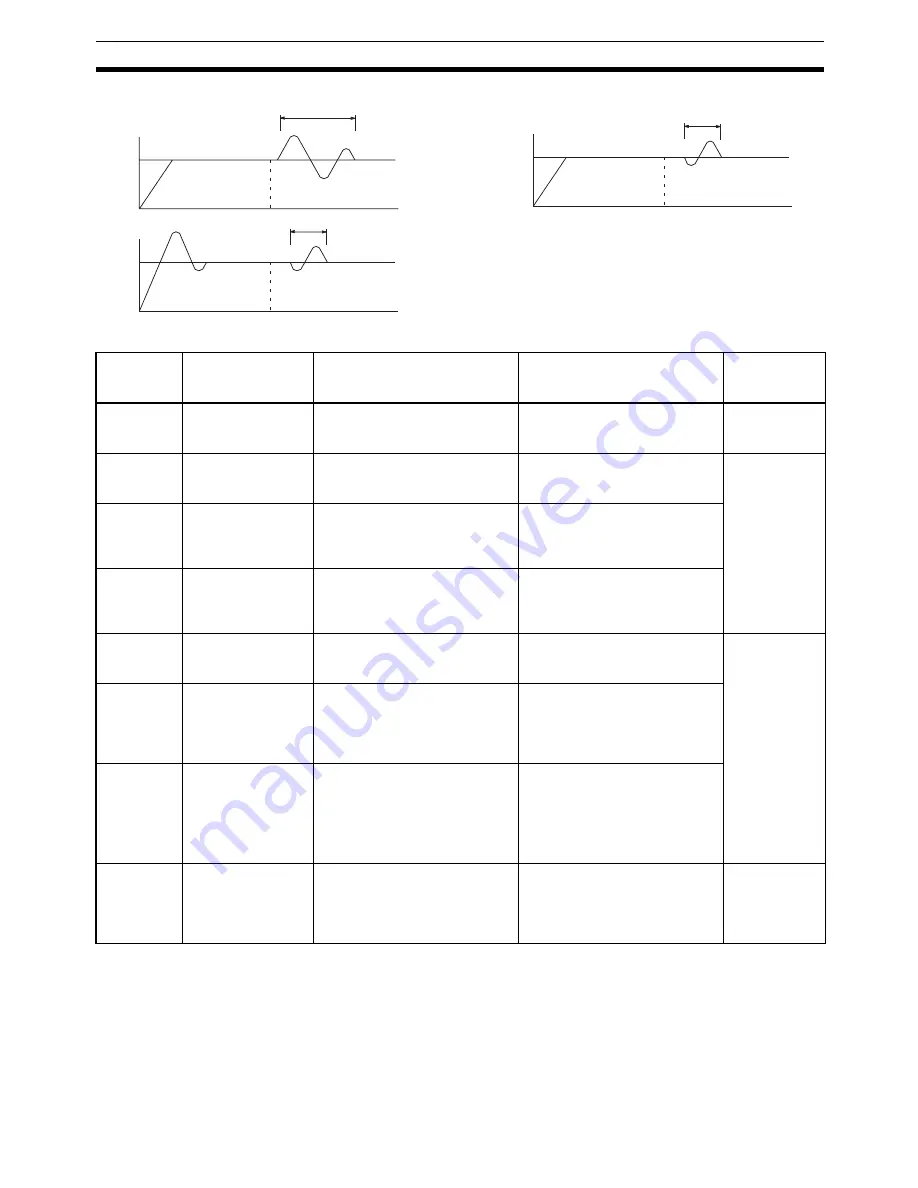
(1)
(2)
(3)
Disturbance response
Simple PID Control
Feed-forward PID Control
As the target response is slowed,
the disturbance response worsens.
As the disturbance response is
slowed, the target response worsens.
Overshoot
Target response
Summary of Contents for SYSMAC CS Series
Page 2: ......
Page 4: ...iv ...
Page 30: ...xxx ...
Page 186: ...146 List of Instructions by Function Code Section 2 4 ...
Page 1320: ...1280 Model Conversion Instructions Unit Ver 3 0 or Later Section 3 35 ...
Page 1390: ...1350 CJ series Instruction Execution Times and Number of Steps Section 4 2 ...
Page 1391: ...1351 Appendix A ASCII Code Table ASCII SP Four leftmost bits Four rightmost bits ...
Page 1392: ...1352 ASCII Code Table Appendix A ...
Page 1404: ...1364 Revision History ...