14-
110
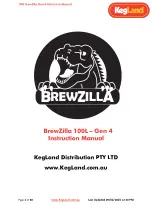
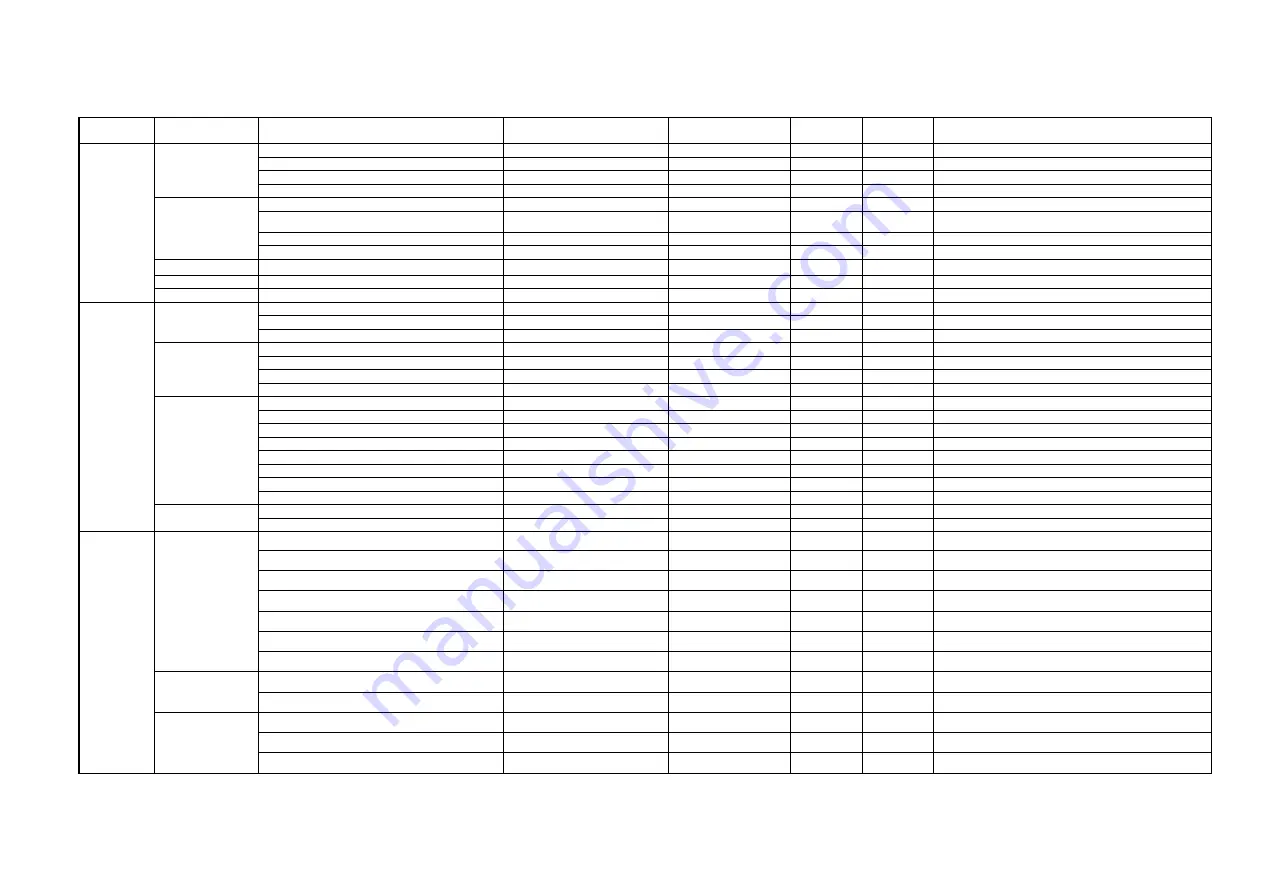
14.5.3 Spindle relevant parameter and Servo drive relevant parameter
Main topic
Topic
Subtopic
Name of Parameter
No. of Parameter
Typical Setting
Value
UNIT
General setting and others
Standard setting
Motor encoder
Encoder specification
ENCODER_SPECIFICATION_0
MD6529(Cn529)
-
-
Number of motor encoder pulse
NUMBER_OF_ENCODER_PULSE_0
MD6533(Cn533)
-
bit
11:2048/12:4096/13:8192/19:19bit serial
Number of PG pulse for position control/rotation of motor (lower word)
FULL_CLOSED_PG_PULSE_L_1
MD6915(Cn87F)
-
pulse
The number of pulse for motor encoder (multiplication-by-four value) is set.
Number of PG pulse for position control/rotation of motor (upper word)
FULL_CLOSED_PG_PULSE_L_1
MD6916(Cn880)
-
pulse
Separately mounted
encoder
Separately mounted encoder specification
ENCODER_SPECIFICATION_1
MD6530(Cn530)
-
-
Number of separately mounted encoder pulse
NUMBER_OF_ENCODER_PULSE_1
MD6534(Cn534)
-
-
The number of pulse (multiplication-by-four value) for 11:2048/12:4096/13:8192/19:19bit
serial/32 or higher
Number of PG pulse for position control/rotation of motor (lower word)
FULL_CLOSED_PG_PULSE_L_1
MD6915(Cn87F)
-
pulse
The number of pulse for separately mounted encoder (multiplication-by-four value) is set.
Number of PG pulse for position control/rotation of motor (upper word)
FULL_CLOSED_PG_PULSE_L_1
MD6916(Cn880)
-
pulse
Motor maximum speed
Rated speed
RATED_SPEED_SETTING
MD6500(Cn500)
-
min
-1
Mask setting
Alarm mask
ALARM_MASK
MD7081(Cn8E6)
-
-
Parameter initialization
Parameter initialization
RESERVED_FOR_USER_OF
MD6988(Cn8C8)
-
-
0: Initial value 1: Initialization
Servo drive
control
Position control
Multi-function selection SSC
MULTI_FUNCTION_SEL_SSC
MD6522(Cn522)
1
-
0: Soft start with SSC disabled 1: Servo mode with SSC enabled
Setting method for position loop gain
GAIN_SWITCH
MD6837(Cn831)
-
-
Excessive deviation range (over flow level)
OVERFLOW_LEVEL
MD6965(Cn8B1)
-
pulse
Speed control
Speed control proportion gain (H gear)
ASR_P_GAIN_H_1
MD6060(Cn060)
-
0.1%/Hz
Speed control integral time (H gear)
ASR_I_TIME_H_1
MD6061(Cn061)
-
0.1ms
Speed control proportion gain (M, L gear)
ASR_P_GAIN_M_L_1
MD6062(Cn062)
-
0.1%/Hz
Speed control integral time (M, L gear)
ASR_I_TIME_M_L_1
MD6063(Cn063)
-
0.1ms
Servo drive mode
Speed control proportion gain (servo mode H gear)
ASR_P_GAIN_H_2
MD6064(Cn064)
-
0.1%/Hz
Speed control integral time (servo mode H gear)
ASR_I_TIME_H_2
MD6065(Cn065)
-
0.1ms
Speed control proportion gain (servo mode M, L gear)
ASR_P_GAIN_M_L_2
MD6066(Cn066)
-
0.1%/Hz
Speed control integral time (servo mode M, L gear)
ASR_I_TIME_M_L_2
MD6067(Cn067)
-
0.1ms
Servo mode magnetic flux level (H gear)
SV_MODE_FLUX_LEVEL_H
MD6201(Cn201)
-
%
Servo mode base speed ratio (H gear)
SV_BASE_SPEED_RATIO_H
MD6202(Cn202)
-
0.01
Servo mode magnetic flux level (M, L gear)
SV_MODE_FLUX_LEVEL_M_L
MD6203(Cn203)
-
%
Servo mode base speed ratio (M, L gear)
SV_BASE_SPEED_RATIO_M_L
MD6204(Cn204)
-
0.01
Analog monitor
Monitor 1 output content
MONITOR_1_OUTPUT
MD6472(Cn472)
0
-
0: Motor speed
Monitor 1 output content
MONITOR_1_OUTPUT
MD6472(Cn472)
1
-
1: Torque reference
Motion control
Spindle sequence relevant
Zero speed detection level
ZERO-SPEED_DET_LEVEL
MD6030(CN030)
-
0.1min
-1
Zero speed detection range
ZERO-SPEED_DET_WIDTH
MD6031(Cn031)
-
0.1min
-1
Speed coincidence signal range
SPEED_AGREE_WIDTH
MD6400(Cn400)
-
%
Ratio for MD6500 (Cn500) is set.
Speed coincidence signal level
SPEED_DETECTION_LEVEL
MD6401(Cn401)
-
0.01%
Ratio for MD6500 (Cn500) is set.
Speed coincidence signal hysteresis
SPEED_DETECTION_WIDTH
MD6402(Cn402)
-
0.01%
Ratio for MD6500 (Cn500) is set.
Torque detection signal level
TORQUE_DETECTION_LEVEL
MD6410(Cn410)
-
0.1%
Ratio for 30-minute rated torque is set.
Torque detection signal hysteresis
TORQUE_DETECTION_WIDTH
MD6411(Cn411)
-
0.1%
Ratio for 30-minute rated torque is set.
Emergency stop
Emergency stop wait time
EMERGENCY_STOP_WAIT_TIME
MD6511(Cn511)
-
ms
Delay between servo cutoff and connector cutoff
TACTOR_OFF_DELAY_TIME
MD6819(Cn819)
-
ms
Torque control
Torque control level on motor side
TORQUE_LIMIT
MD6421(Cn421)
-
%
Torque control level on regenerator side
REGENERATION_TORQUE_LIMIT
MD6422(Cn422)
-
%
Variable torque control selection
TORQU_LIMIT_SELECT
MD6423(Cn423)
-
-
0: Disabled 1: Enabled
Summary of Contents for CNC Series
Page 1: ...Maintenance Manual Serviceman Handbook MANUAL No NCSIE SP02 19 Yaskawa Siemens CNC Series...
Page 26: ...Part 1 Hardware...
Page 38: ...System Configuration 1 2 3 Spindle motor designations 1 12...
Page 58: ...Installing the control panels 2 3 5 Installing lightning surge absorbers 2 20...
Page 62: ...Installing the motors 3 4...
Page 84: ...Connection method 4 3 2 Setting the rotary switches on the inverters and servo units 4 22...
Page 96: ...Part 2 Software...
Page 102: ...Software configuration 6 6...
Page 113: ...7 2 Network settings 7 11 8 Click on the radio button to the left of Specify an IP address...
Page 121: ...7 2 Network settings 7 19...
Page 122: ...Part 3 PLC...
Page 154: ...Part 4 Setting up and maintenance...
Page 160: ...Overview of System 10 1 2 Basic operation 10 6...
Page 204: ...How to use Digital Operation 12 2 9 Setting the password setting for write prohibit 12 32...
Page 327: ...Error and Troubleshooting 15 4...
Page 328: ...15 1 Errors without Alarm Display and Troubleshooting 15 5...
Page 329: ...Error and Troubleshooting 15 6...
Page 343: ...Maintenance and Check 16 3 3 Setting up Initializing Absolute encoder 16 14...