



























Setup & Operation 11. I/O Remote Settings
70
RC180 Rev.17
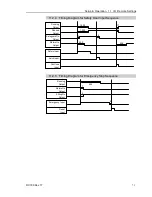
11.2 Timing Specifications
11.2.1 Design Notes for Remote Input Signals
The following charts indicate the timing sequences for the primary operations of the
Controller.
The indicated time lapses (time durations) should be referred to only as reference values
since the actual timing values vary depending on the number of tasks running, as well as
CPU speed of the Controller. Check carefully and refer to the following charts for the
timing interrelation when you enter an input signal.
During system design, make sure that you actuate only one remote input operation at a
time, otherwise an error will occur.
The pulse width of an input signal must be 25 or more milliseconds to be detected.
[Unit: msec]
11.2.2 Timing Diagram for Operation Execution Sequence
940
924
Depending on
HOME motion
MotorsOn
Output
AtHome
Output
SetMotorsOn
Input
SetMotorsOff
Input
Home
Input
11.2.3 Timing Diagram for Program Execution Sequence
17
17
13
107
107
16
15
162
Ready
Output
CurrProg1
Output
Running
Output
* Paused
Output
SelProg1
Input
Start
Input
Pause
Input
Continue
Input
Stop
Input
162
*
The duration varies depending on the Quick Pause (QP) setting and the program’s
operating status at the time of Pause input
Summary of Contents for RC180
Page 1: ...Rev 17 EM164C3205F ROBOT CONTROLLER RC180 ...
Page 2: ...ROBOT CONTROLLER RC180 Rev 17 ...
Page 13: ...Safety This section contains information for safety of the Robot System ...
Page 14: ......
Page 20: ......
Page 124: ...Setup Operation 12 Option Units 112 RC180 Rev 17 ...
Page 125: ...Maintenance This section contains maintenance procedures for the Robot Controller ...
Page 126: ...114 ...







































































