





























Maintenance 8. Trouble Shooting
RC180 Rev.17
223
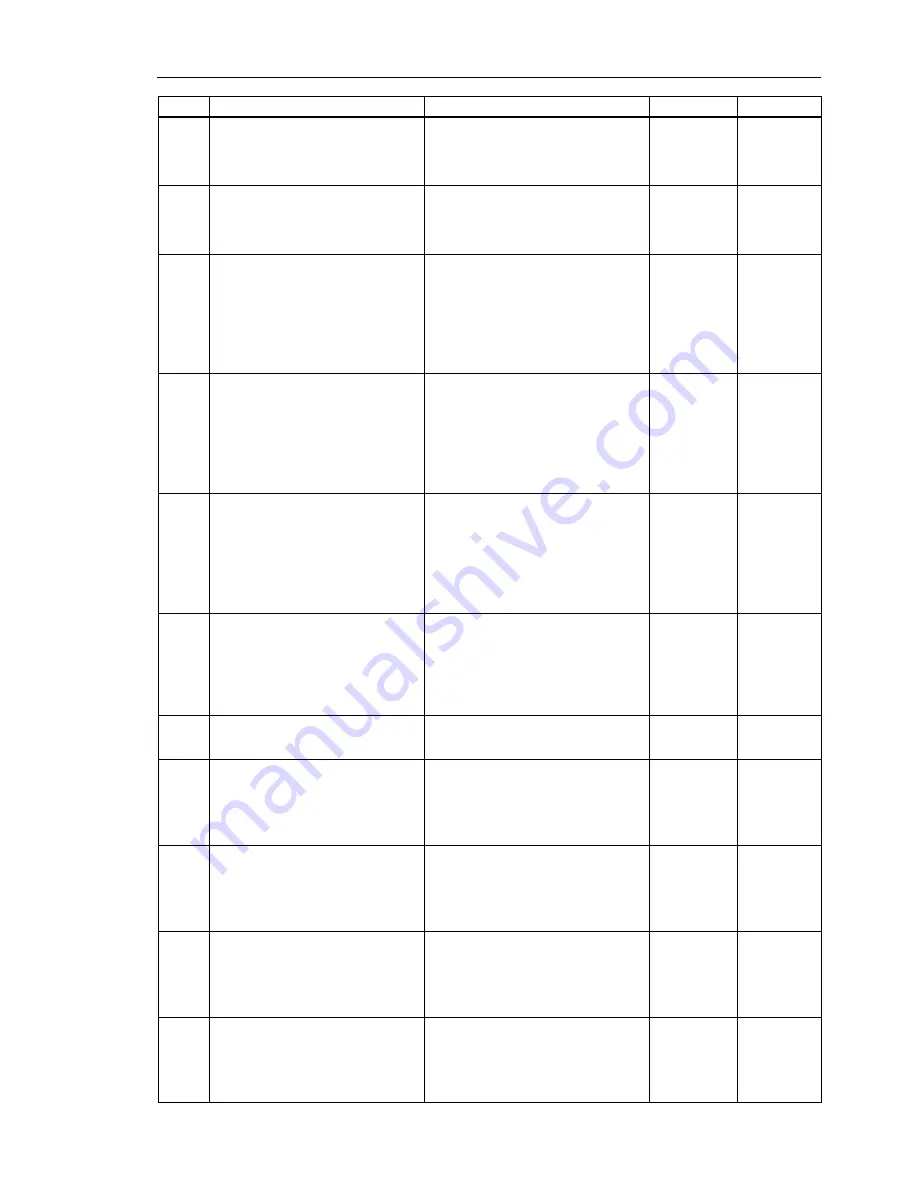
No.
Message
Remedy
Note 1
Note 2
4267
Attempt to exceed the J4Flag attribute
without indication.
You attempted to exceed the J4Flag
attribute during motion without the
J4Flag indication.
Change the J4Flag for the target point.
4268
Attempt to exceed the J6Flag attribute
without indication.
You attempted to exceed the J6Flag
attribute during motion without the
J6Flag indication.
Change the J6Flag for the target point.
4269
Attempt to exceed the particular wrist
orientation attribute without
indication.
You attempted to exceed the particular
wrist orientation attribute during motion
without the Wrist indication.
Change the Wrist attribute for the target
point.
Change the target point to avoid a
particular wrist orientation.
4270
Attempt to exceed the particular arm
orientation attribute without
indication.
You attempted to exceed the particular
hand orientation attribute during motion
without the Hand indication.
Change the Hand attribute for the target
point.
Change the target point to avoid a
particular hand orientation.
4271
Attempt to exceed the particular elbow
orientation attribute without
indication.
You attempted to exceed the particular
elbow orientation attribute during
motion without the Elbow indication.
Change the Elbow attribute for the target
point.
Change the target point to avoid a
particular elbow orientation.
4272
Specified point flag is invalid.
For a CP motion command, the arm
form at the target point is different from
the point flag specified with the target
point.
Change the point flag for the target
point.
4273
J6Flag switched during the lift motion
in coveyor tracking
Adjust the Tool orientation so that
J6Flag will not switch
4274
Manipulator motion did not match to
J6Flag of the target point
For a CP motion command, the
manipulator reached to the target point
with J6Flag which differs from the one
specified for the target point.
Change J6Flag for the target point.
4275
Manipulator motion did not match to
J4Flag of the target point
For a CP motion command, the
manipulator reached to the target point
with J4Flag which differs from the one
specified for the target point.
Change J4Flag for the target point.
4276
Manipulator motion did not match to
ArmFlag of the target point
For a CP motion command, the
manipulator reached to the target point
with ArmFlag which differs from the
one specified for the target point.
Change ArmFlag for the target point.
4277
Manipulator motion did not match to
ElbowFlag of the target point
For a CP motion command, the
manipulator reached to the target point
with ElbowFlag which differs from the
one specified for the target point.
Change ElbowFlag for the target point.
Summary of Contents for RC180
Page 1: ...Rev 17 EM164C3205F ROBOT CONTROLLER RC180 ...
Page 2: ...ROBOT CONTROLLER RC180 Rev 17 ...
Page 13: ...Safety This section contains information for safety of the Robot System ...
Page 14: ......
Page 20: ......
Page 124: ...Setup Operation 12 Option Units 112 RC180 Rev 17 ...
Page 125: ...Maintenance This section contains maintenance procedures for the Robot Controller ...
Page 126: ...114 ...







































































