





























Maintenance 8. Trouble Shooting
RC180 Rev.17
222
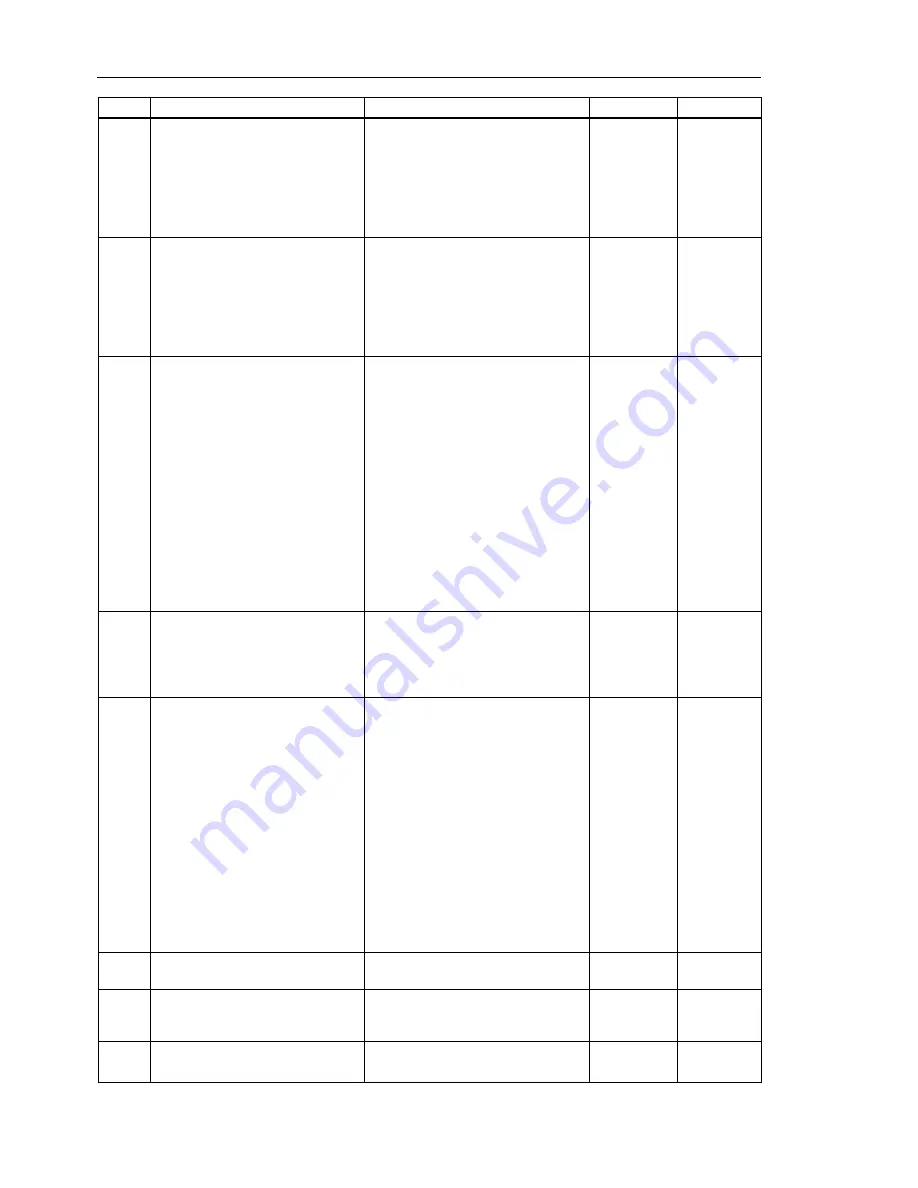
No.
Message
Remedy
Note 1
Note 2
4233
Servo real time status failure.
Communication error with the servo
CPU.
A communication error was detected in
the controller.
Check the short-circuit and improper
connection of the peripheral equipment
wiring. (Emergency, D-I/O, and
Expansion I/O connectors)
Replace the controller.
4240
Irregular motion control interruption
was detected.
Interruption duplicate.
A interruption error was detected in the
controller.
Check the short-circuit and improper
connection of the peripheral equipment
wiring. (Emergency, D-I/O, and
Expansion I/O connectors)
Replace the controller.
4241
Over speed during low power mode
was detected.
The robot over speed was detected
during low power mode.
Check the robot mechanism.
(Smoothness, backlash, non-smooth
motion, loose belt tension, brake)
Check whether the robot does not
interfere with peripheral equipment.
(Collision, contact)
Replace the motor driver.
Replace the motor. (Motor and encoder
failure)
Check the short-circuit and improper
connection of the peripheral equipment
wiring. (Emergency, D-I/O, and
Expansion I/O connectors)
4242
Improper acceleration reference was
generated.
You attempted to operate the robot with
the acceleration reference exceeding the
specified value.
For a CP motion, decrease the AccelS
value.
4243
Improper speed reference is generated
in the high power mode.
The robot over speed was detected
during high power mode.
Check the robot mechanism.
(Smoothness, backlash, non-smooth
motion, loose belt tension, brake)
Check whether the robot does not
interfere with peripheral equipment.
(Collision, contact)
Replace the motor driver.
Replace the motor. (Motor and encoder
failure)
Check the short-circuit and improper
connection of the peripheral equipment
wiring. (Emergency, D-I/O, and
Expansion I/O connectors)
4250
Arm reached the limit of motion range
during the operation.
Check whether a CP motion trajectory is
within the motion range.
4251
Arm reached the limit of XY motion
range specified by XYLim during the
operation.
Check the XYLim setting.
4252
Coordinate conversion error occurred
during the operation.
Check whether a CP motion trajectory is
within the motion range.
Summary of Contents for RC180
Page 1: ...Rev 17 EM164C3205F ROBOT CONTROLLER RC180 ...
Page 2: ...ROBOT CONTROLLER RC180 Rev 17 ...
Page 13: ...Safety This section contains information for safety of the Robot System ...
Page 14: ......
Page 20: ......
Page 124: ...Setup Operation 12 Option Units 112 RC180 Rev 17 ...
Page 125: ...Maintenance This section contains maintenance procedures for the Robot Controller ...
Page 126: ...114 ...







































































