





























Maintenance 8. Trouble Shooting
RC180 Rev.17
218
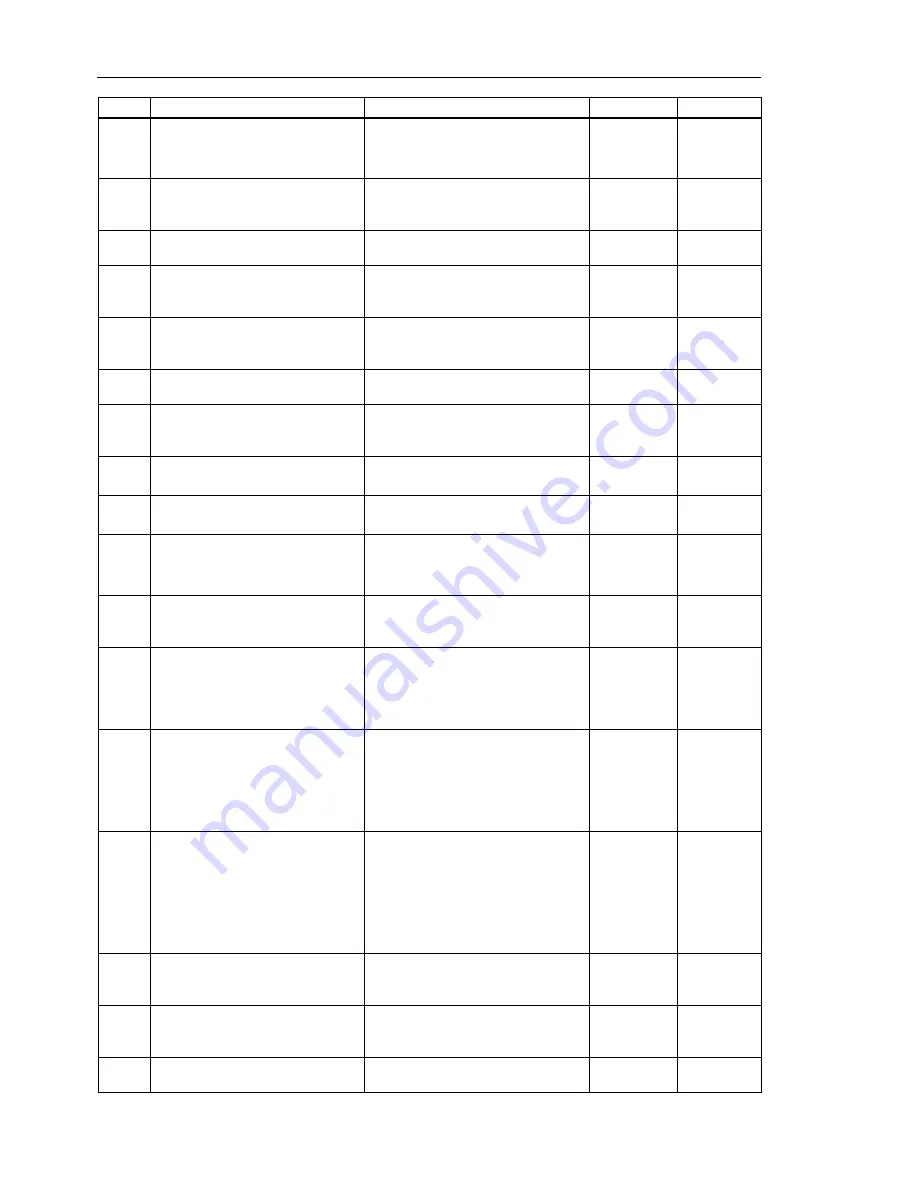
No.
Message
Remedy
Note 1
Note 2
4050
Curve failure. Number of points is out
of the allowable range.
The number of available point numbers
differs according to the curve form.
Check the number of points again.
4051
Curve failure. Local attribute and the
point attribute of all specified points
do not match.
Match the local and point flag for all the
specified points.
4052
Curve failure. Not enough memory to
format the curve file.
Reboot the controller.
4053
Curve failure. Failed to format the
curve file.
Review the point data. Check whether
adjacent two points do not overlap on
the specified point line.
4054
Curve failure. Curve file error
The Curve file is broken. Create a
Curve file again with the Curve
statement.
4055
Curve failure. No distance for curve
file movement.
Review the point data.
4056
Curve failure. Point positions for the
Curve statement are too close.
Set the distance between two points
adjacent to the specified point more than
0.001 mm.
4059
Executed encoder reset command
while the motor is in the on state.
Turn the motor power OFF.
4060
Executed an invalid command while
the motor is in the on state.
Turn the motor power OFF.
4061
Specified parameter is in use.
You attempted to clear the currently
specified Arm and Tool.
Select other Arm and Tool and execute.
4062
Orientation variation is over 360
degrees.
You attempted to rotate the joint #J6
more than 360 degrees with a CP motion
command.
4063
Orientation variation of adjacent point
is over 90 degrees.
On the specified point line by the Curve
statement, set the orientation variation of
U, V, and W coordinate values between
two adjacent points to under 90 degrees.
4064
Cannot execute the orientation
correction automatically.
On the specified point line, a curve
cannot be created by automatic
orientation correction.
Change the specified point line so that
the joint #J6 orientation variation
decreases.
4065
Attempt to revolve J6 one rotation
with the same orientation in CP
statement.
You attempted to rotate the joint #J6
more than 360 degrees with a CP motion
command. You attempted to revolve
the joint 6 one rotation with the same as
motion start orientation.
Change the target point so that the joint
#J6 revolves less than one rotation.
4066
Motion command was attempted in
the prohibited area depended on joint
combination.
You attempted to move the joints to the
robot's interference limited area.
4068
ROT modifier parameter was specified
for the CP motion command without
orientation rotation.
Delete the ROT from the CP motion
command.
4069
Specified ECP without selecting ECP
in CP statement.
Specify a valid ECP.
Summary of Contents for RC180
Page 1: ...Rev 17 EM164C3205F ROBOT CONTROLLER RC180 ...
Page 2: ...ROBOT CONTROLLER RC180 Rev 17 ...
Page 13: ...Safety This section contains information for safety of the Robot System ...
Page 14: ......
Page 20: ......
Page 124: ...Setup Operation 12 Option Units 112 RC180 Rev 17 ...
Page 125: ...Maintenance This section contains maintenance procedures for the Robot Controller ...
Page 126: ...114 ...







































































