





























Drive control and features
67
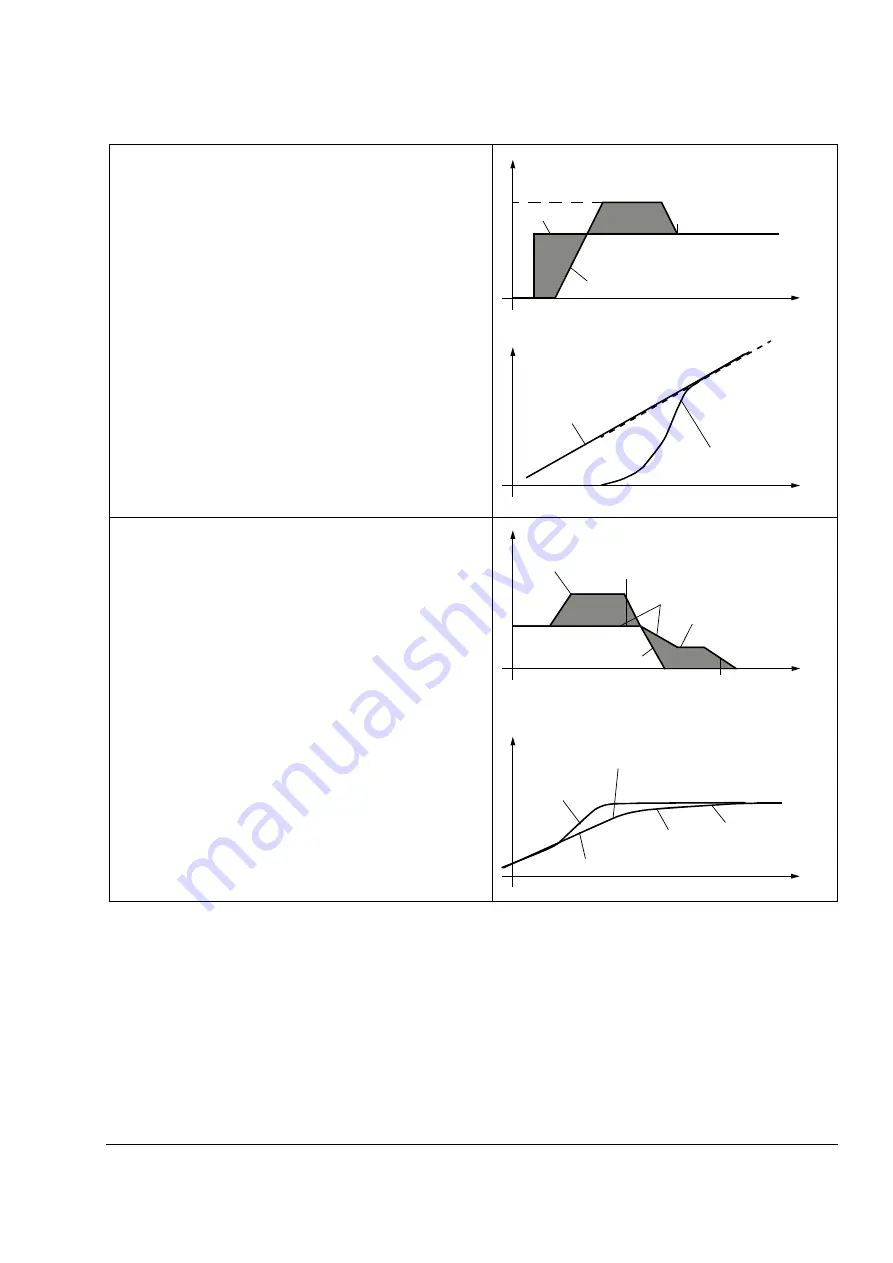
Start: linear axis, absolute synchronisation
Used when the master and the follower are to be driven
equal distances.
is set to
.
To catch the master position, the follower accelerates
up to its maximum allowed speed. Master position
changes which take place before and after the follower
is started are taken into account.
Stop: linear axis
is set to
The figure shows how the dynamic limiter works
together with the position profile generator when the
drives are stopped: Before the stop command of the
master, the speed of the follower is limited by the
dynamic speed limiter (
), which
results in a position error. When the master starts to
decelerate, the follower uses positioning deceleration,
and, eventually, positioning speed to overcome the
position error.
t
A
B
A = B
Speed
Follower speed
Master speed
t
Position
Follower position
Master position
Follower start
Synchron
position
reference
t
A
B
Follower speed
Master speed
A = B
Speed
Master speed
STOP
/
/
t
A
B
Follower position
Position
Master
position
/
Summary of Contents for ACSM1 Series
Page 1: ...ABB motion control drives Firmware manual ACSM1 motion control program ...
Page 4: ......
Page 34: ...Drive programming using PC tools 34 ...
Page 86: ...Drive control and features 86 ...
Page 265: ...Parameters and firmware blocks 265 1 100 us 100 µs 2 1 ms 1 ms 3 50 ms 50 ms ...
Page 302: ...Parameter data 302 ...
Page 422: ...Application program template 422 ...
Page 430: ...Appendix A Fieldbus control 430 ...
Page 500: ...Appendix D Application examples 500 ...
Page 508: ...Appendix E Control chain and drive logic diagrams 508 ...
Page 510: ...3AFE68848270 REV H EN 2015 06 26 Contact us www abb com drives www abb com drivespartners ...





















































