





























Parameters and firmware blocks
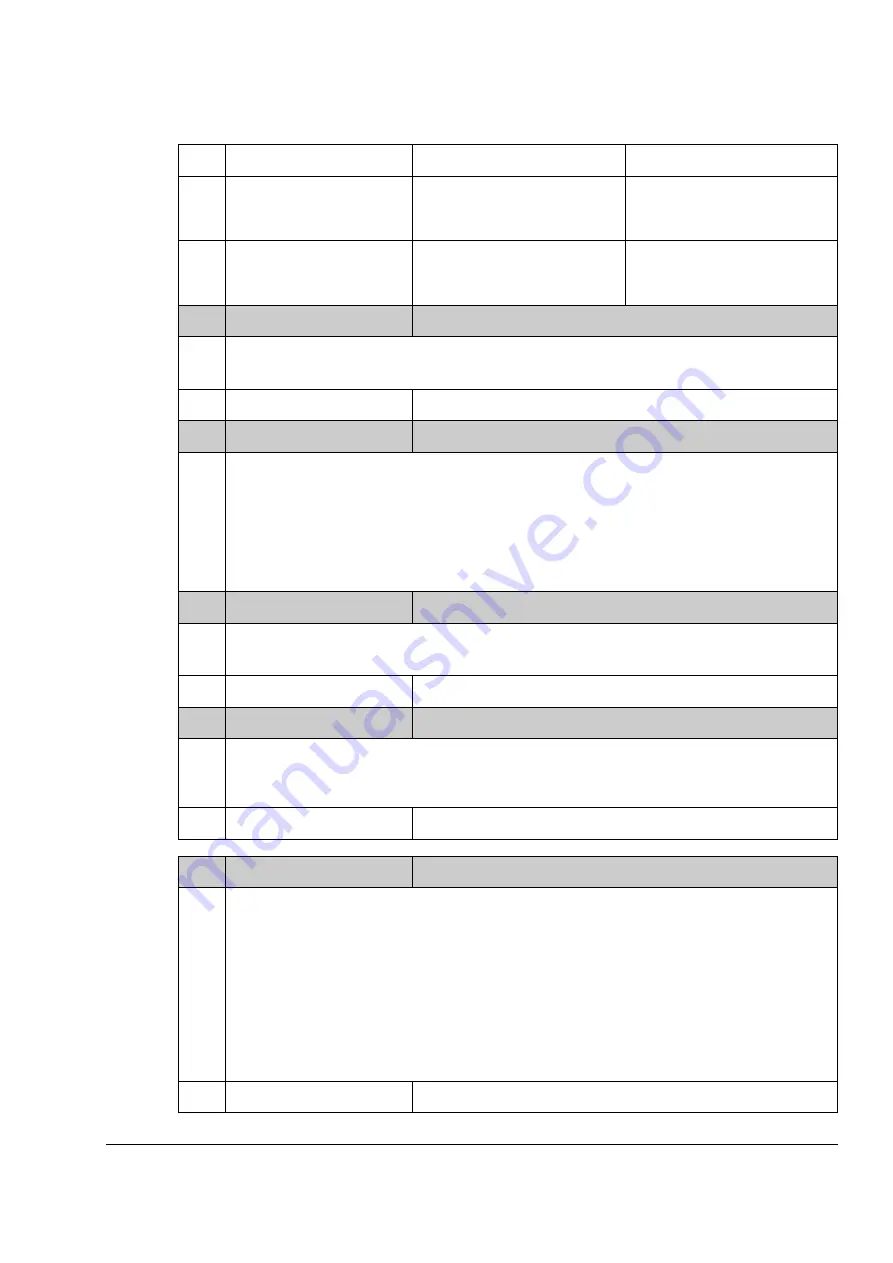
229
(28)
ENC2 DI2=0 z
Encoder 2 position
First zero pulse when DI2 = 0
(29)
PROBE1 SW
Encoder 1 position
The trigger signal is selected by
parameter
(30)
PROBE2 SW
Encoder 1 position
The trigger signal is selected by
parameter
62.16
PROBE1 POS
(see above)
Defines the reference position for position probe 1.
The unit depends on parameter
selection.
-32768…32768
Reference position for position probe 1.
62.17
TRIG PROBE2
(see above)
Defines the position data source and triggering condition used for probe 2 latching. When the
triggering condition is fulfilled, the position received from the selected data source is set as probe 2
position.
In case the triggering condition is dependent on the zero pulse, the probe is latched upon the rising
edge of the zero pulse. The source of the zero pulse is defined by parameter
.
For selections, see parameter
.
62.18
PROBE2 POS
(see above)
Defines the reference position for position probe 2.
The unit depends on parameter
selection.
-32768…32768
Reference position for position probe 2.
62.19
MAX CORRECTION
(see above)
Defines the maximum absolute value for cyclic correction. Example: If maximum value is set to 50
revolutions and the requested cyclic correction is 60 revolution, no correction is made.
The unit depends on parameter
selection.
0…32768
Maximum absolute value for cyclic correction.
62.20
POS ACT OFFSET
(see above)
Offsets all the position values used by the position system, effectively correcting the position and
revolution count signal received from the encoder. For example, this parameter can be used if a non-
zero position signal received from the encoder needs to be defined as the zero position for the
application.
For example, if this parameter is set to a value of -100, the absolute position of 100 revolutions as
measured by the encoder is interpreted as the zero position.
Notes:
• The offset takes effect upon the next power-up or when an encoder reconfiguration command is
given using parameter
• The offset will not be visible through any actual signal or other parameter.
-32768…32768
Offset for actual position value.
Summary of Contents for ACSM1 Series
Page 1: ...ABB motion control drives Firmware manual ACSM1 motion control program ...
Page 4: ......
Page 34: ...Drive programming using PC tools 34 ...
Page 86: ...Drive control and features 86 ...
Page 265: ...Parameters and firmware blocks 265 1 100 us 100 µs 2 1 ms 1 ms 3 50 ms 50 ms ...
Page 302: ...Parameter data 302 ...
Page 422: ...Application program template 422 ...
Page 430: ...Appendix A Fieldbus control 430 ...
Page 500: ...Appendix D Application examples 500 ...
Page 508: ...Appendix E Control chain and drive logic diagrams 508 ...
Page 510: ...3AFE68848270 REV H EN 2015 06 26 Contact us www abb com drives www abb com drivespartners ...





















































