





























Drive control and features
52
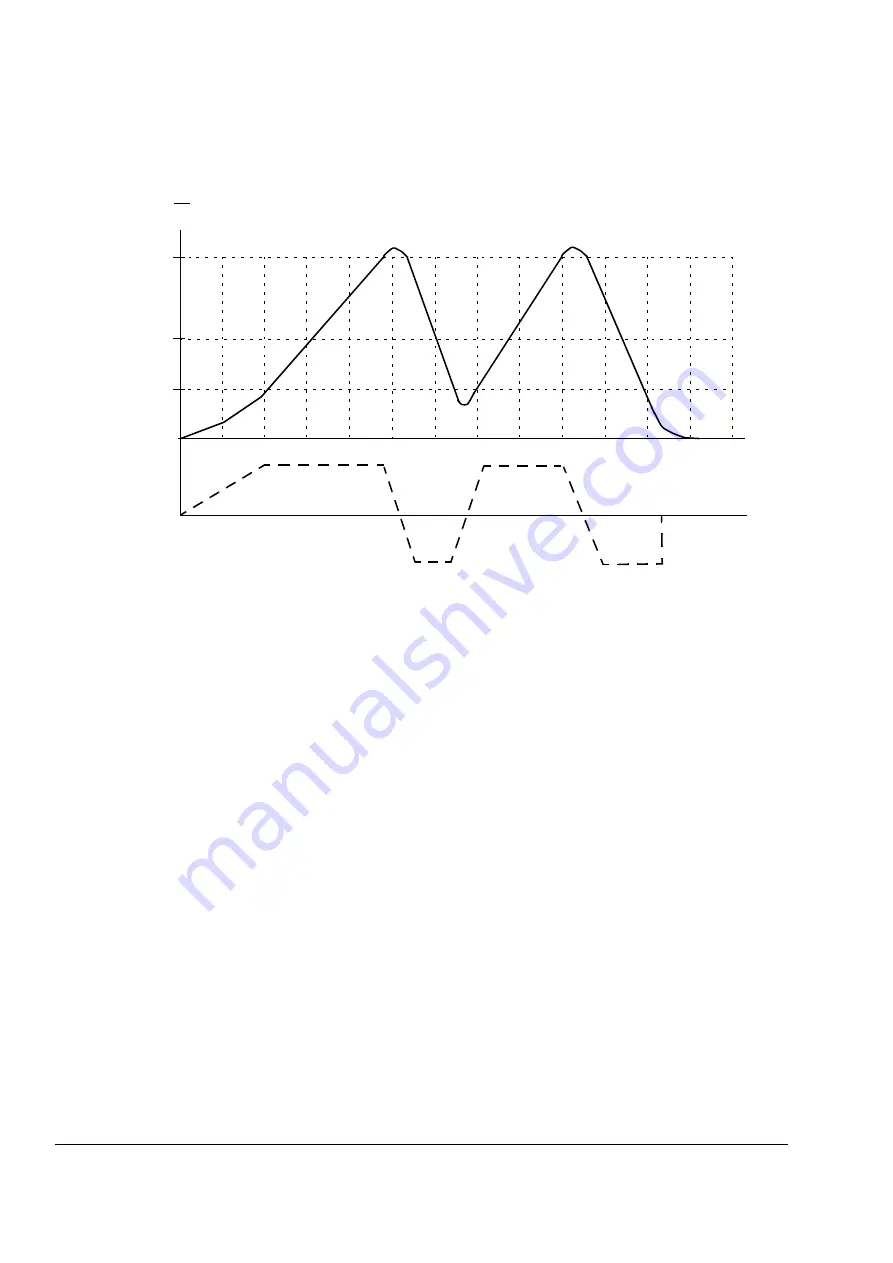
The figure below illustrates the motor speed and torque behaviour during an
autotuning routine.
The prerequisites for performing the autotune routine are:
• The motor ID run has been successfully completed
• Speed, torque, current and acceleration limits (parameter groups
set
• Speed feedback filtering, speed error filtering and zero speed are set (parameter
• The drive is stopped.
The results of the autotune routine are automatically transferred into parameters
•
(proportional gain of the speed controller)
•
(integration time of the speed controller)
•
(mechanical time constant of the machinery).
Note:
The autotuning routine accelerates and decelerates the motor according to
the ramp times set in group
, and these values have an effect on the autotuning
results.
A: Speed actual
B: Torque reference
%
t
n
B
n
N
A
0
0.25
0.5
0.9
t
Summary of Contents for ACSM1 Series
Page 1: ...ABB motion control drives Firmware manual ACSM1 motion control program ...
Page 4: ......
Page 34: ...Drive programming using PC tools 34 ...
Page 86: ...Drive control and features 86 ...
Page 265: ...Parameters and firmware blocks 265 1 100 us 100 µs 2 1 ms 1 ms 3 50 ms 50 ms ...
Page 302: ...Parameter data 302 ...
Page 422: ...Application program template 422 ...
Page 430: ...Appendix A Fieldbus control 430 ...
Page 500: ...Appendix D Application examples 500 ...
Page 508: ...Appendix E Control chain and drive logic diagrams 508 ...
Page 510: ...3AFE68848270 REV H EN 2015 06 26 Contact us www abb com drives www abb com drivespartners ...





















































