





























Parameters and firmware blocks
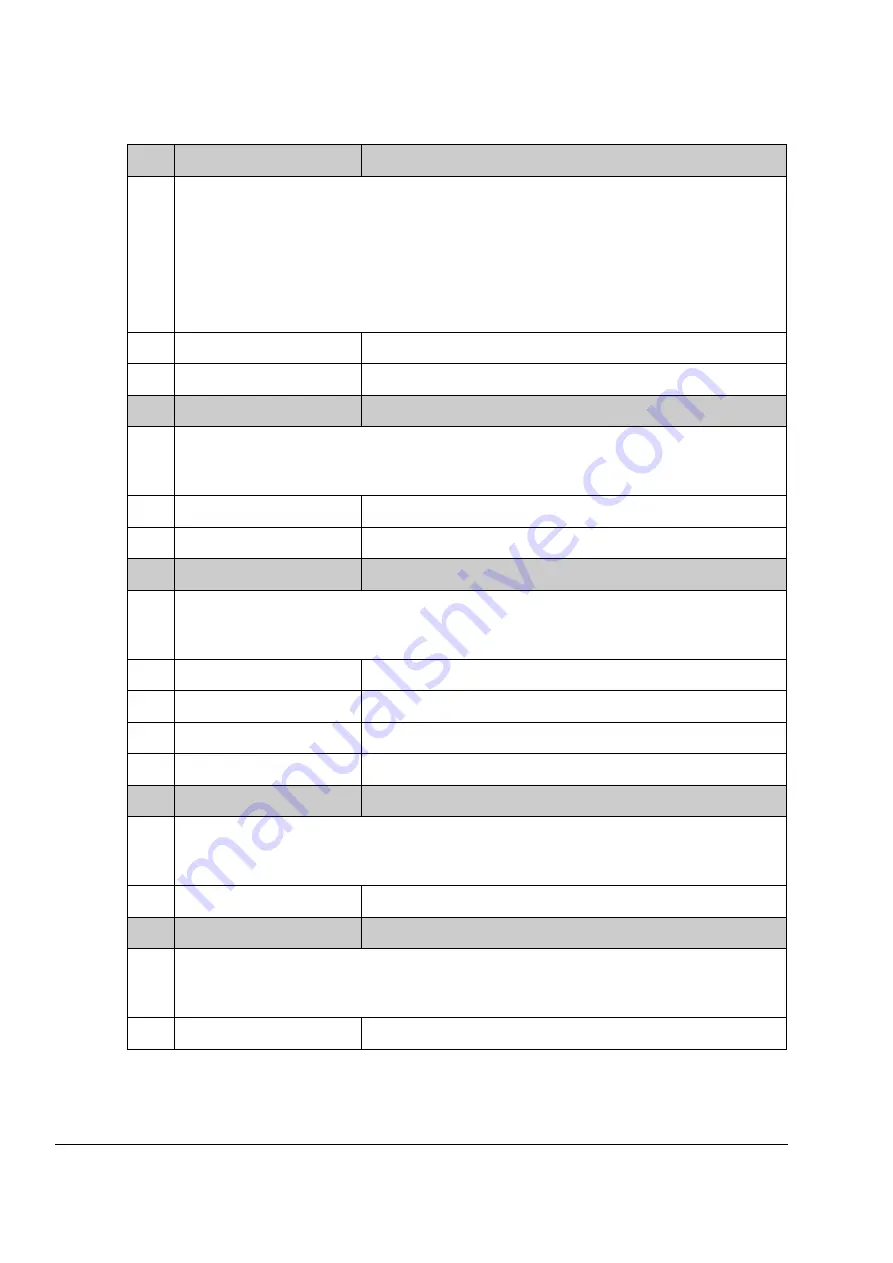
262
91.06
ABS POS TRACKING
(see above)
Enables position tracking, which counts the number of absolute encoder overflows (single and
multiturn encoder and resolver) in order to determine the actual position uniquely and clearly after a
power-up (or encoder refresh), especially with an odd load gear ratio.
Each time the position tracking is enabled or disabled, it must also be activated by setting parameter
.
Note:
If the encoder was turned by more than half the encoder range while the drive was switched off,
the overflow counter has to be cleared. To clear the counter, set
.
(0)
Disable
Position tracking disabled.
(1)
Enable
Position tracking enabled.
91.10
HIPERFACE PARITY
(see above)
Defines the use of parity and stop bit(s) for HIPERFACE encoder (ie, when parameter
is set to
).
Typically this parameter does not need to be set.
(0)
Odd
Odd parity indication bit, one stop bit.
(1)
Even
Even parity indication bit, one stop bit.
91.11
HIPERF BAUDRATE
(see above)
Defines the transfer rate of the link for HIPERFACE encoder (ie, when parameter
Typically this parameter does not need to be set.
(0)
4800
4800 bits/s.
(1)
9600
9600 bits/s.
(2)
19200
19200 bits/s.
(3)
38400
38400 bits/s.
91.12
HIPERF NODE ADDR
(see above)
Defines the node address for HIPERFACE encoder (ie, when parameter
is
Typically this parameter does not need to be set.
0…255
HIPERFACE encoder node address.
91.20
SSI CLOCK CYCLES
(see above)
Defines the length of the SSI message. The length is defined as the number of clock cycles. The
number of cycles can be calculated by adding 1 to the number of the bits in a SSI message frame.
Used with SSI encoders, ie, when parameter
is set to
2…127
SSI message length.
Summary of Contents for ACSM1 Series
Page 1: ...ABB motion control drives Firmware manual ACSM1 motion control program ...
Page 4: ......
Page 34: ...Drive programming using PC tools 34 ...
Page 86: ...Drive control and features 86 ...
Page 265: ...Parameters and firmware blocks 265 1 100 us 100 µs 2 1 ms 1 ms 3 50 ms 50 ms ...
Page 302: ...Parameter data 302 ...
Page 422: ...Application program template 422 ...
Page 430: ...Appendix A Fieldbus control 430 ...
Page 500: ...Appendix D Application examples 500 ...
Page 508: ...Appendix E Control chain and drive logic diagrams 508 ...
Page 510: ...3AFE68848270 REV H EN 2015 06 26 Contact us www abb com drives www abb com drivespartners ...





















































