





























Parameters and firmware blocks
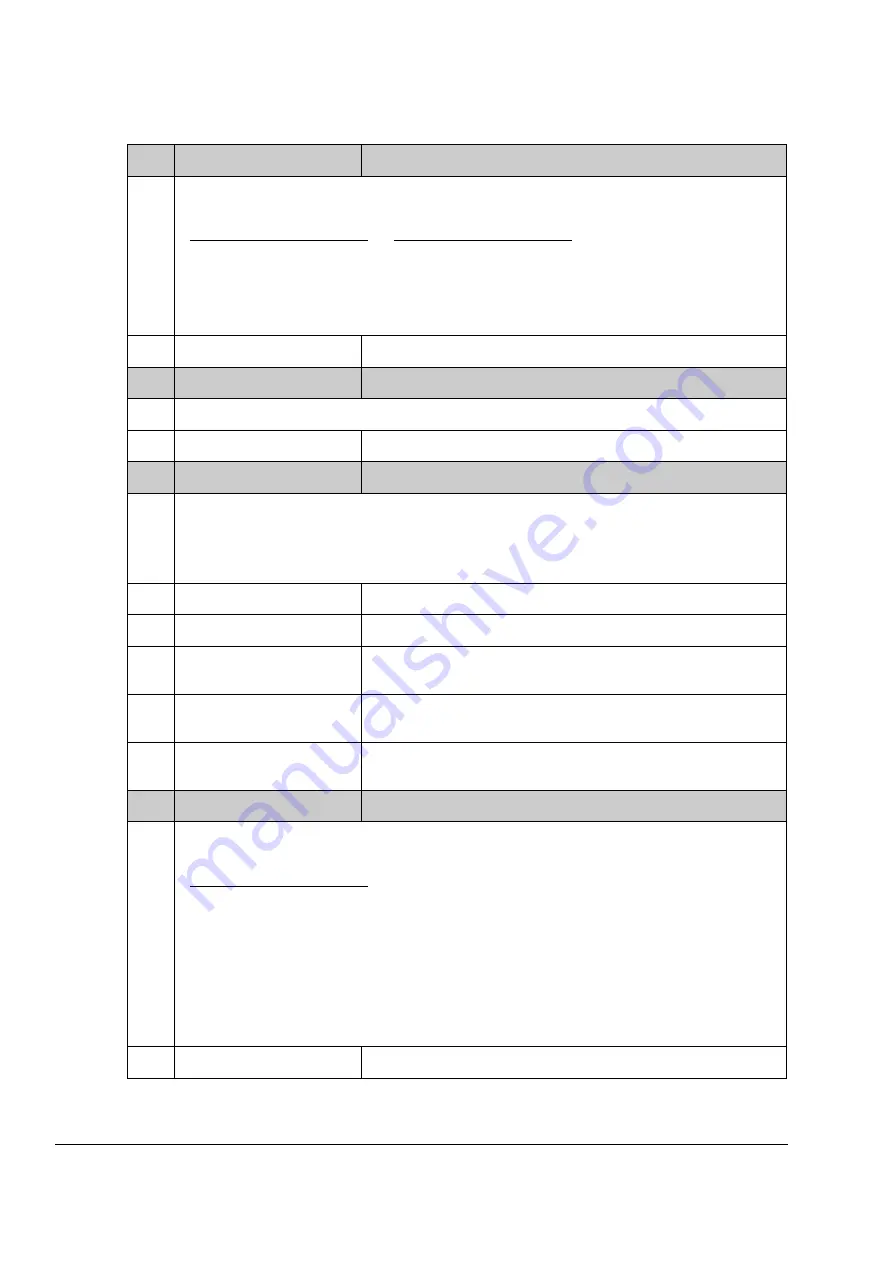
220
60.03
LOAD GEAR MUL
(see above)
Defines the numerator for the load encoder gear function. See also section
on page
Note:
When load encoder gear function is set, the gear function defined by parameters
must also be set.
See also sections
(page
) and
).
-2
31
…2
31
- 1
Numerator for load encoder gear.
60.04
LOAD GEAR DIV
(see above)
Defines the denominator for the load encoder gear function. See parameter
1…2
31
- 1
Denominator for load encoder gear.
60.05
POS UNIT
(see above)
Selects the unit and scaling for the position parameters. The scaling factor is equal to one revolution.
For positioning speed, acceleration and deceleration units, see parameter
.
Note:
If translatory (m, inch) unit is selected, the range also depends on parameter
and
settings.
(0)
Revolution
Unit: revolution. Scaling factor: 1.
(1)
Degree
Unit: degree. Scaling factor: 360.
(2)
Meter
Unit: metre. Scaling factor: according to parameters
and
(3)
Inch
Unit: inch. Scaling factor: according to parameters
and
(3)
Millimetre
Unit: millimetre. Scaling factor: according to parameters
and
60.06
FEED CONST NUM
(see above)
Defines, together with parameter
, the feed constant for the position
calculation:
The feed constant converts rotational motion into translatory motion. The feed constant is the distance
the load moves during one turn of the motor shaft (2
π
r), when linear positioning has been selected
with
(ie, parameter is set to
or
).
Note:
Parameters
,
and
also
affect the positioning parameters. If the feed constant is changed, positioning references are
re-calculated and the limits are changed. However, the internal motor shaft references remain
unchanged.
1… 2
31
-1
Feed constant numerator.
=
Load speed
Encoder 1/2 speed
Summary of Contents for ACSM1 Series
Page 1: ...ABB motion control drives Firmware manual ACSM1 motion control program ...
Page 4: ......
Page 34: ...Drive programming using PC tools 34 ...
Page 86: ...Drive control and features 86 ...
Page 265: ...Parameters and firmware blocks 265 1 100 us 100 µs 2 1 ms 1 ms 3 50 ms 50 ms ...
Page 302: ...Parameter data 302 ...
Page 422: ...Application program template 422 ...
Page 430: ...Appendix A Fieldbus control 430 ...
Page 500: ...Appendix D Application examples 500 ...
Page 508: ...Appendix E Control chain and drive logic diagrams 508 ...
Page 510: ...3AFE68848270 REV H EN 2015 06 26 Contact us www abb com drives www abb com drivespartners ...





















































