





























3
F
unction
d
iag
ram
s
3.12
Basic positioner
(EPOS)
SINAMICS
G120D
70
8
L
ist Manual (LH
14)
, 01/2
016
, A5E3384231
3
F
ig.
3
-100
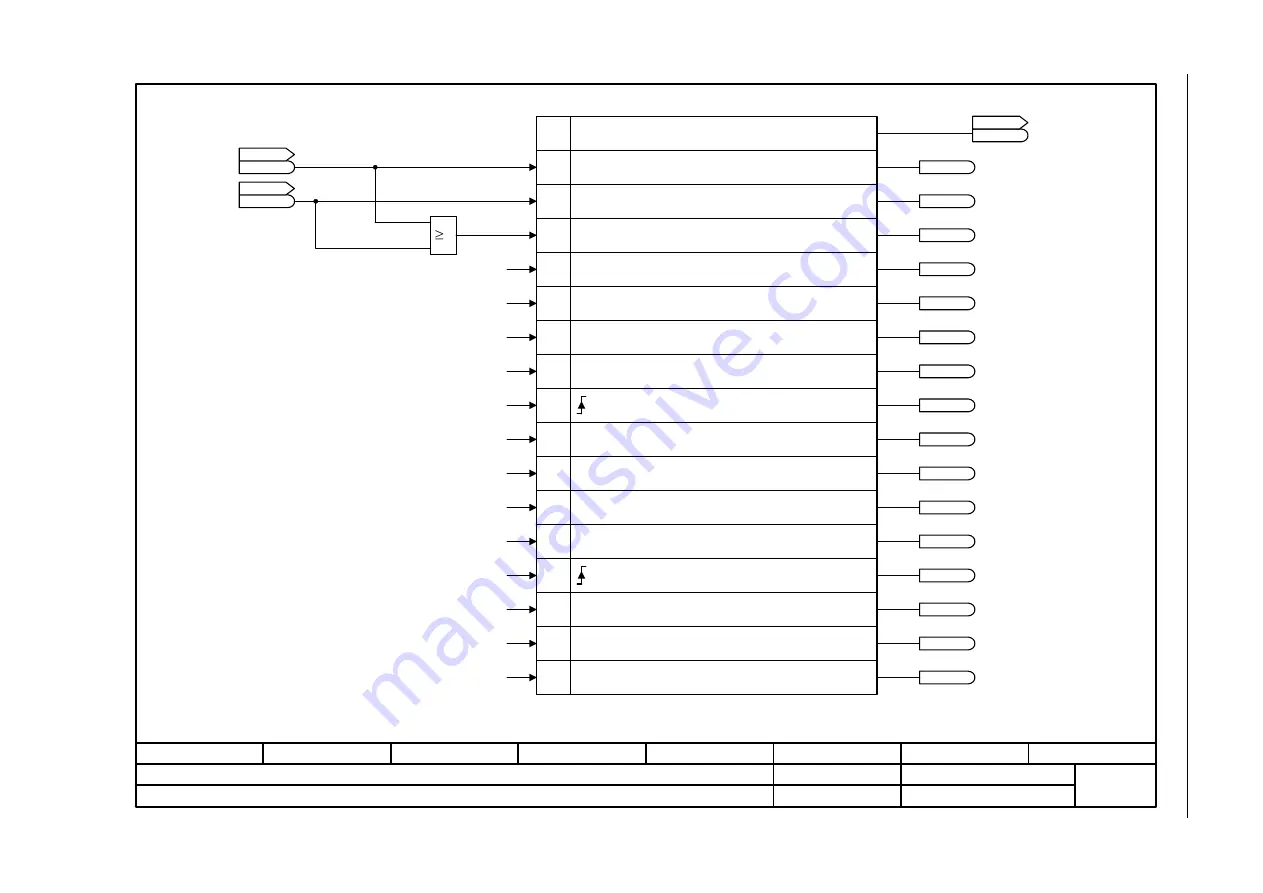
36
46 – Sta
tus word
2
(r26
84)
- 3646 -
Function diagram
8
7
6
5
4
3
2
1
fp_3646_97_55.vsd
Basic positioner (EPOS)
G120D CU250D-2
09.12.2015
V4.7.6
Status word 2 (r2684)
11
12
13
14
15
10
7
6
5
4
3
2
1
0
9
Status word, positioning mode
1 = Reference point approach active
1 = Flying referencing active
1 = Print mark outside the outer window
1 = Referencing active
1 = Axis is accelerating
1 = Axis is decelerating
1 = Jerk limiting active
1 = Following error within tolerance
1 = Modulo correction active
1 = Target position reached
1 = Reference point set
1 = STOP cam minus active
1 = Traversing command active
= Acknowledgment traversing block activated
Bit No.
= Activate correction
1 = STOP cam plus active
[3635.7]
[3635.7]
[3635.3]
[3612.7]
[3635.3]
[4025.8]
[4020.8]
[3630.1]
[3616.7]
[3630.3]
[3630.3]
[3614.4]
r2684.0
r2684.1
r2684.4
r2684.5
r2684.11
r2684.2
r2684.6
r2684.9
r2684.7
r2684.8
r2684.10
r2684.12
r2684.13
r2684.14
[3614.3], [3630.1]
r2684.3
POS_ZSW2
r2684
r2684
From dynamic following error monitoring, cam controllers
From standstill/positioning monitoring
From "referencing/flying referencing" mode
From interpolator
From interpolator
From interpolator
From interpolator
From traversing range limits
From "referencing" mode
From “traversing block“ mode
From traversing range limits
From traversing range limits
[3612.7]
POS_ZSW2
r2684
r2684
.0
[3614.7]
POS_ZSW2
r2684
r2684
.1
2
1
[3635.4]
From interpolator
[3614.8]
From "referencing/flying referencing" mode
[3620.8]
From "direct setpoint input/MDI" mode
[3635.7]
From interpolator
By default, the status bit is supplied with values from the “traversing block“ mode.
However, if the “direct setpoint input/MDI“ mode is active, it is supplied with values from this mode.
The signal is only effective when the drive has reached the "Ready" state.
<1>
<2>
<1>
<2>
r2684.15
[4020.1]
[4010.3], [4015.1]
[4010.1]
[4010.1]
8







































































