




























61
Detail program description - Loading a new memory location
notice that no failsafe settings have yet been made.
More about this can be found on page 192.
If the screen should display the warning …
•
Throttle
too
high !
… then move the throttle joystick, or the limiter for
a helicopter, into its idle position; by default this is
rotary control CTRL 6.
The appearance of this warning also depends on
the "Motor at C1" or "Pitch min" in the
"Model type"
menu,
refer to page 80 or "
Helicopter type
" page 84
for the selected setting. For winged aircraft models,
select "None" to deactivate this message if you have
no motor to enter.
If the transmitter already has occupied model
•
memories then submenus of the "
Copy / Erase
"
menu will display a pictogram of the selected model
type at the respective memory location followed by a
blank line or the model name which was entered in
the "
Basic settings
" menu (see page 68 or 74) and
any bond that may exist between a receiver and this
model memory.
If battery voltage is too low, you cannot
•
switch
models for safety reasons. A corresponding message
will appear in the display:
not possible now
voltage too low
As a basic principle, there are four different ways to
assign the four control functions, aileron, elevator,
rudder and throttle or brake fl aps for winged models
the transmitter is switched on again the undesired
occupation of the that model memory will have to be
erased from another memory location.
In contrast, if a non-active memory location is erased,
it will subsequently be marked as "
free
" in
the "Model select" menu.
After the selected model memory is initialized with
•
the desired model type, the display will switch to the
base screen of the freshly occupied model memory.
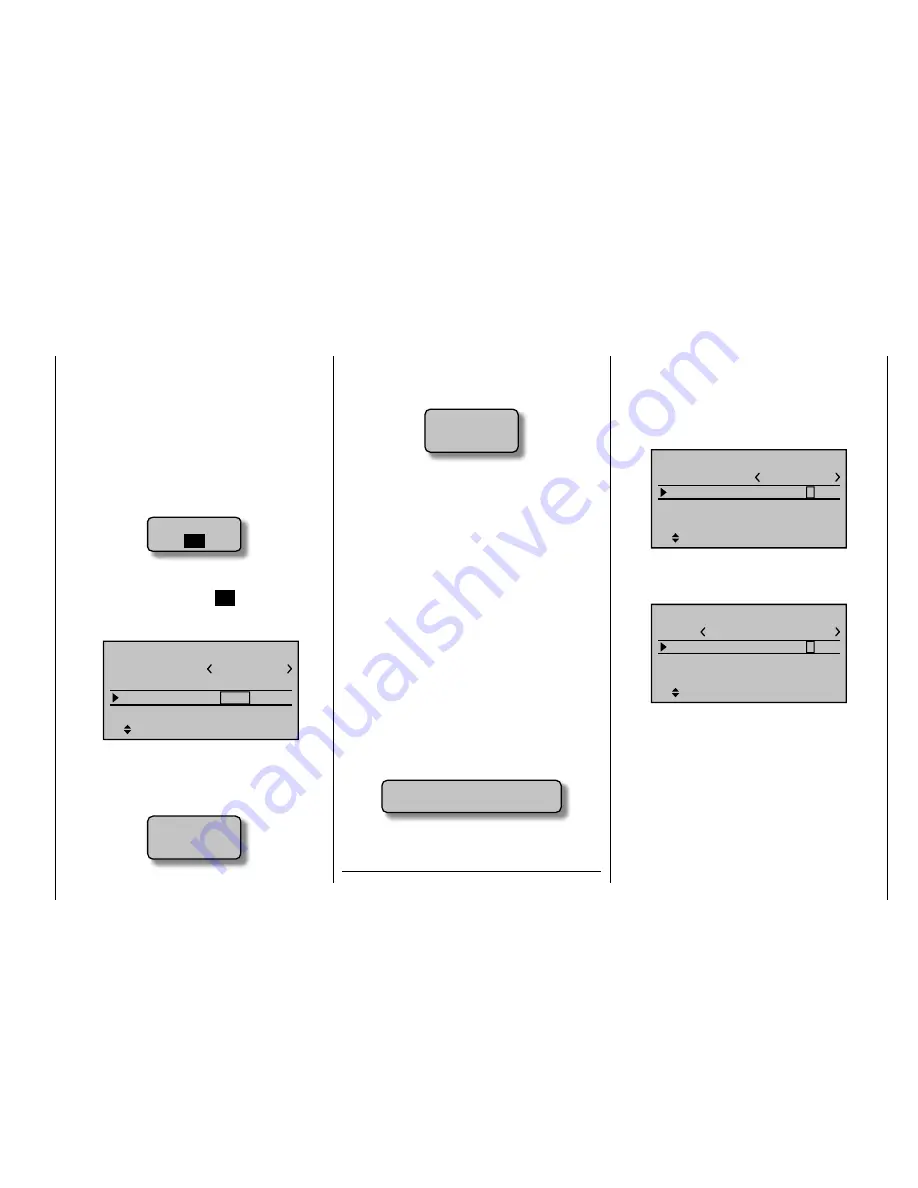
At this time the warning …
BIND N/A
OK
… will appear in the screen for a few seconds as
notifi cation that a "bond" to a receiver does not exist.
With a brief tap on the center
SET
button in the right
touch pad you can jump directly to the appropriate
option.
1
BD2
BD1
Mod.name
Stick mode
RF BIND
n/a
BASIC SETTINGS, MODEL
n/a
RF transmit
OFF
Further details about binding a receiver can be found
on page 69 or 75.
After the aforementioned "BIND. N/A" warning
•
message closes automatically, the warning …
Fail Safe
setup
t.b.d.
… will appear (also for just a few seconds) to serve
* N.N. = Nomen Nominandum (the name to be stated)
as well as rolling, pitching, tail rotor and throttle/pitch
for helicopter models, to the two joysticks. Just which
of these methods is used depends on the preferences
of the individual model pilot. This function is set for the
currently active model memory in the "
Stick mode
" line
of the "
Basic settings, model
" menu, page 68 or 74.
1
n/a
bind
SEL
R12
Mod.name
Stick mode
RF BIND
BASIC SETTINGS, MODEL
Rcv Ch Map
n/a
A default value for this setting can be made for future
models in the generalized "
Basic Settings
" menu, page
216.
1
PPM10
SEL
BASIC SETTINGS
Own
Stick mode
DSC Output
Pitch min
back
It should be noted here once again that, in the interest
of greatest fl exibility in combination with the prevention
of unintentional operating errors, no controls are
preassigned to control channels 5 … 12 by default.
This means that, in the system's
delivered state, only
servos attached to receiver outputs 1 … 4 can be
moved by the two joysticks and that any servos
attached to receiver connectors 5 … 12 (max)
will remain in their middle positions.
When a new
helicopter model is initialized, servo 6 may perform a
movement – depending on the throttle limiter's position,
Summary of Contents for mx-20 Hott
Page 41: ...41 Your notes...
Page 49: ...49 Your notes...
Page 55: ...55 Your notes...
Page 81: ...81 Your notes...
Page 85: ...85 Your notes...
Page 89: ...89 Your notes...
Page 99: ...99 Detail program description Control adjust...
Page 127: ...127 Detail program description Control adjust...
Page 131: ...131 Detail program description Control adjust...
Page 163: ...163 Detail program description Control adjust...
Page 191: ...191 Detail program description Control adjust...
Page 207: ...207 Detail program description Control adjust...
Page 228: ...228 Detail program description Control adjust...
Page 229: ...229 Detail program description Control adjust...
Page 251: ...251 Detail program description Control adjust...







































































