





























217
Detail program description - Control adjust
By pressing the central SET key of the right touch pad,
you now start the test run. The input fi eld is shown as
"normal" again:
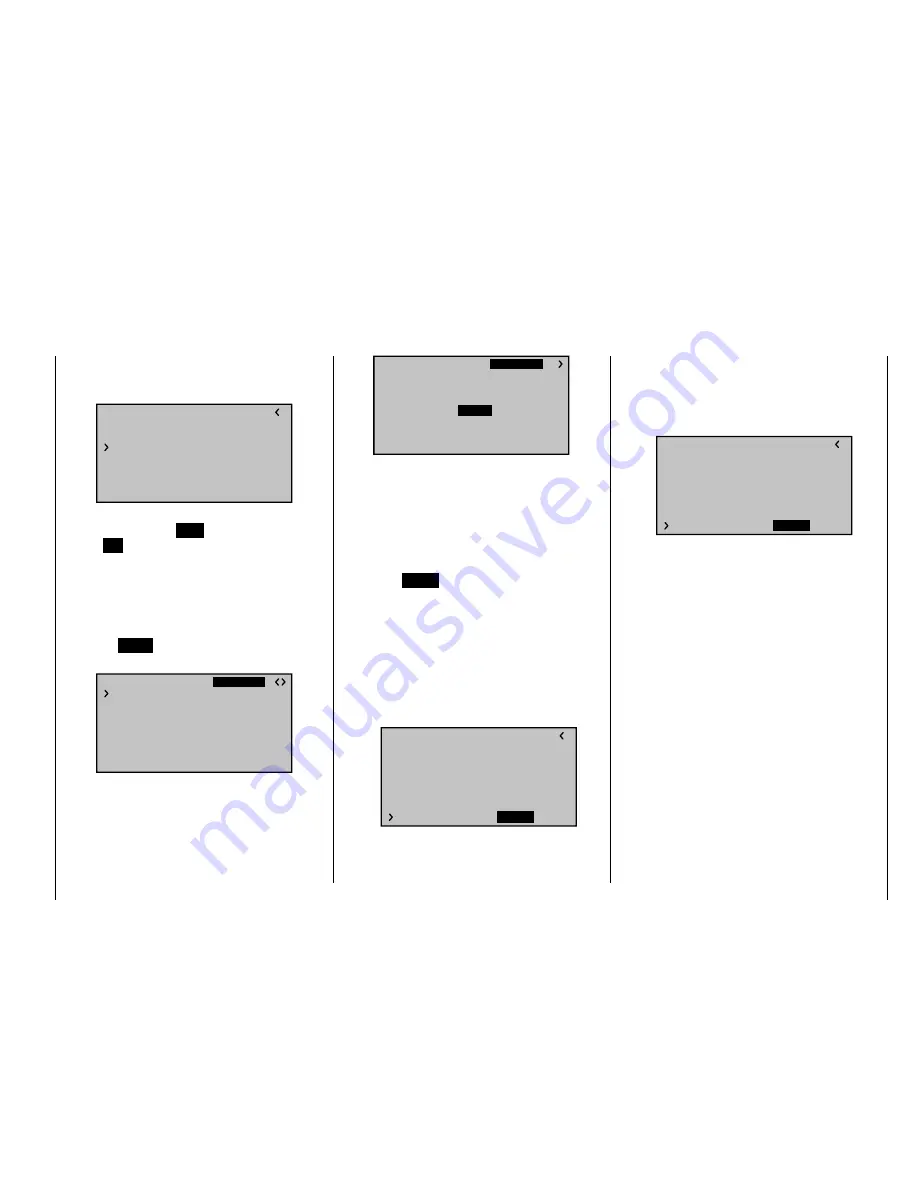
RX SERVO TEST
ALL–MIN : 1000
μ
sec
ALL–MAX : 2000
μ
sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUT TYPE:ONCE
TEST : START
To stop the servo test, reactivate the input fi eld as
described above, select
STOP
and confi rm this selection
with the
SET
key of the right touch pad.
ALARM VOLT (receiver undervoltage warning)
The receiver voltage is monitored through ALARM
VOLT. The interval can be adjusted between 3.0
and 6.0 Volt. If the set alarm threshold is undercut,
an acoustic signal is issued (interval peep tone long/
short) and "
VOLT.E
" blinks in the top right of all "
RX …
"
displays:
RX SERVO
REVERSE : OFF
CENTER : 1500
μ
sec
TRIM : –000
μ
sec
TRAVEL– : 150%
OUTPUT CH: 01
: 150%
PERIOD : 20msec
VOLT.E
The parameter "
R-VOLT
" is also represented inversely
in the "
RX DATAVIEW
" display:
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
L.R-VOLT:03.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
R-VOLT :
03.7
V
RX DATAVIEW
VOLT.E
ALARM TEMP +/- (recommended temperature
monitoring)
These two options monitor the receiver temperature. A
lower threshold "ALARM TEMP-" (-20 … +10 °C) and an
upper threshold "ALARM TEMP+" (50 … 80 °C) can be
programmed. When these specifi cations are exceeded
or undercut, an acoustic signal (continuous peep tone)
sounds and "
TEMP.E
" appears in the top right of all
receiver displays. In addition, the parameter "
R-TEM
" is
shown inversely on the "
RX DATAVIEW
" display page.
Make sure that your receiver remains within the
permissible temperature range during all fl ight
conditions (ideally between -10 and 55 °C).
CH OUTPUT TYPE (connection type)
Here you select how the receiver outputs are controlled.
ONCE
•
RX SERVO TEST
ALL–MIN : 1000
μ
sec
ALL–MAX : 2000
μ
sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUT TYPE:
ONCE
The servo connections of the receiver are controlled
successively. This is recommended for analog servos.
With this setting the servos are automatically
operated in a cycle of 20 ms – with a 12-channel
receiver (Order No.
33512
) 30 ms – regardless of
what is set or displayed in the "PERIOD" line in the
"
RX SERVO
" display!
SAME
•
RX SERVO TEST
ALL–MIN : 1000
μ
sec
ALL–MAX : 2000
μ
sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUT TYPE:
SAME
The servo connections of the receiver are controlled
in parallel in blocks of four. That means the channels
1 to 4, 5 to 8 and 9 to 12 each receive the control
signals simultaneously.
This is recommended for digital servos when multiple
servos are used for one function (e.g. aileron), so
that the servos can run absolutely synchronized.
When only using digital servos, we recommend
setting the "PERIOD" line of the "
RX SERVO
" to 10
ms in order to be able to utilize the fast reaction of
digital servos. With the use of analog servos or in
mixer mode, "20 ms" must be selected!
With this setting, pay particular attention to the
suffi cient dimensioning of the receiver current
supply.
Since up to four servos can always operate
simultaneously, the requirement is higher.
SUMO (sum signal OUT)
•
Summary of Contents for mx-20 Hott
Page 41: ...41 Your notes...
Page 49: ...49 Your notes...
Page 55: ...55 Your notes...
Page 81: ...81 Your notes...
Page 85: ...85 Your notes...
Page 89: ...89 Your notes...
Page 99: ...99 Detail program description Control adjust...
Page 127: ...127 Detail program description Control adjust...
Page 131: ...131 Detail program description Control adjust...
Page 163: ...163 Detail program description Control adjust...
Page 191: ...191 Detail program description Control adjust...
Page 207: ...207 Detail program description Control adjust...
Page 228: ...228 Detail program description Control adjust...
Page 229: ...229 Detail program description Control adjust...
Page 251: ...251 Detail program description Control adjust...







































































