





























213
Detail program description - Control adjust
on the channel set in the OUTPUT CH line.
The factory setting for all servos is "HOLD".
For each selected OUTPUT CH (servo connection of the
receiver) you can choose between:
FAI(L) SAFE
•
With this selection, in the event of a failure the
corresponding servo moves to the position shown in
the "POSITION" line for the remainder of the failure
until the "Delay time" set in the "DELAY" line has
lapsed.
HOLD
•
With a setting of "HOLD", in the event of a failure
the servo maintains the last correctly received servo
position for the duration of the failure.
OFF
•
With a setting of "OFF", in the event of a failure
the receiver discontinues the retransmission
of (temporarily stored) control impulses for the
respective servo output for the duration of the failure.
In other words, the receiver switches the impulse line
"off".
ATTENTION: Analog servos and even some digital
servos no longer put up any resistance against the
previous control pressure during the failure of the
control impulse and are more or less pushed out of
their position as a result.
F.S.POS. (Fail-Safe position)
For each OUTPUT CH (servo connection of the
receiver), set the respective servo position, which the
servo should assume in the event of a failure in "FAI(L)
SAFE" mode, in the line "F.S.POS." after activation of
the value fi eld (inverse representation) by pressing the
SET
key in the right touch pad and with the arrow keys
of the right touch pad. The adjustment takes place in
10-µs increments.
Factory setting: 1500 µs (servo center).
Important notice:
The function "F.S.POS." has an additional meaning in all
three modes, "OFF", "HOLD" and "FAI(L) SAFE" in the
event that the receiver is switched on, but (still) does not
receive a valid signal.
The servo immediately travels to the fail-safe position
predefi ned in the "Position" line. In doing so, the landing
gear, for example , is is prevented from retracting of the
receiver is accidentally switched on while the transmitter
is switched off. In normal model mode, on the other
hand, the corresponding servo behaves in accordance
with the set "MODE" in the event of a failure.
DELAY (fail-safe reaction time or delay)
Here you adjust the delay time after which the servos
should move to their predetermined positions in the
event of a signal interruption. This setting is adopted
for all channels and only pertains to the servos
programmed to the "FAI(L) SAFE" mode.
Factory setting: 0.75 s.
FAIL SAFE ALL (global fail-safe setting)
This submenu allows you to determine the fail-safe
positions of Servos with a "push of a button" in a similar
manner to the "Fail Safe" described on page
196
.
Switch to the line "FAIL SAFE ALL" and activate the
value fi eld by pressing the central
SET
key of the right
touch pad. "
NO
" is represented inversely. Then adjust
the parameter to "
SAVE
" with one of the arrow keys of
the right touch pad. Now, using the operating elements
of the transmitter, move all servos to the desired fail-
safe position you assigned or want to assign in the line
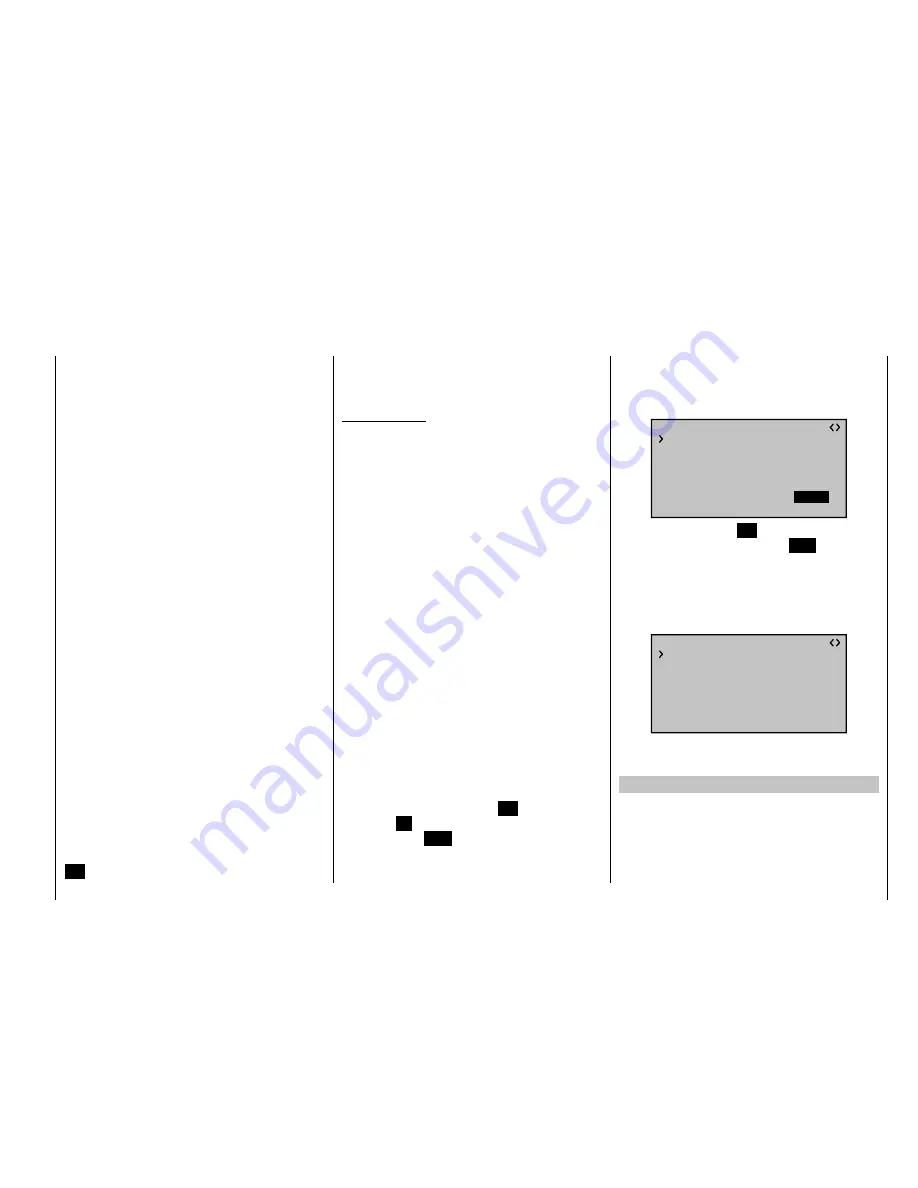
"MODE" "FAI(L) SAFE". The current position of the
control for the channel which was just set is shown in
the bottom "Position" line:
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.POS. : 1500
μ
sec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670
μ
sec
FAIL SAFE ALL:
SAVE
After pressing the central
SET
key of the right touch
pad, the display switches back from "
SAVE
" to "
NO
".
The saved the positions of all servos affected by this
measure and adopted them in parallel to the line
"F.S.Pos." and the display then immediately shows
the following for the current OUTPUT CH (servo
connection):
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.POS. : 1670
μ
sec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670
μ
sec
FAIL SAFE ALL: NO
Switch off the transmitter and check the fail-safe
positions based on the servo throws.
"Fail Safe" in combination with "Channel Mapping"
In order to ensure that the mapped servos – that is
to say servos which are controlled from a common
control channel (INPUT CH) – react the same way even
in the event of a failure,
the corresponding settings of
the INPUT CH determine the behavior of the mapped
servos!!!
Summary of Contents for mx-20 Hott
Page 41: ...41 Your notes...
Page 49: ...49 Your notes...
Page 55: ...55 Your notes...
Page 81: ...81 Your notes...
Page 85: ...85 Your notes...
Page 89: ...89 Your notes...
Page 99: ...99 Detail program description Control adjust...
Page 127: ...127 Detail program description Control adjust...
Page 131: ...131 Detail program description Control adjust...
Page 163: ...163 Detail program description Control adjust...
Page 191: ...191 Detail program description Control adjust...
Page 207: ...207 Detail program description Control adjust...
Page 228: ...228 Detail program description Control adjust...
Page 229: ...229 Detail program description Control adjust...
Page 251: ...251 Detail program description Control adjust...







































































