





























Description of the Software Modules and Parameters
Parameter manual
b maXX
BM5800
Document No.: 5.16029.03
257
3
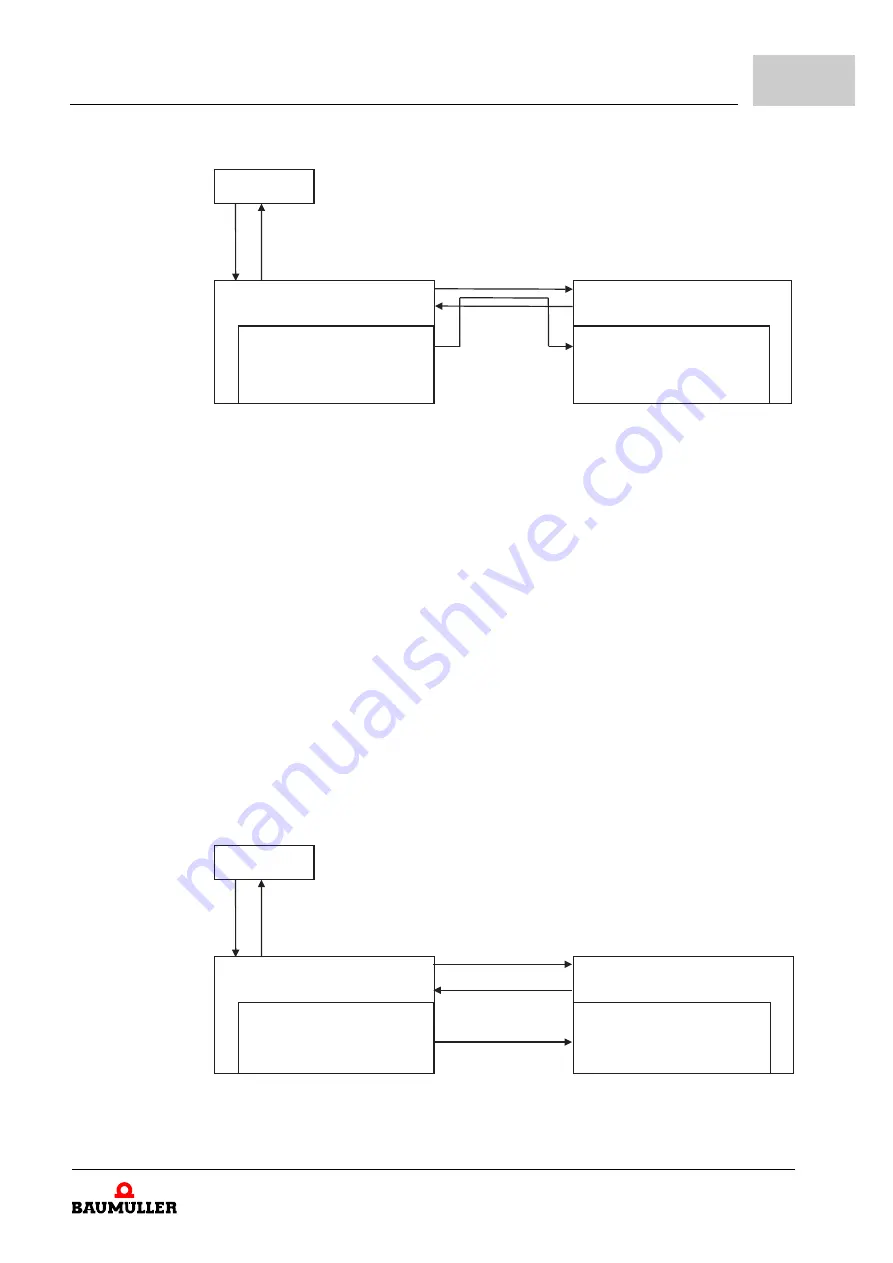
Figure 74:
Cross communication via EtherCAT
The drive master writes its actual values (coupling command master, torque set value
master, torque init stress actual value master (optional)) in the telegram received from the
control and sends up the telegram to the drive slave. The drive slave reads this values in
the same bus cycle as its set values. Therefore
m
the drive master must be located physically in the EtherCAT cycle in front of the drive
slave in order that the drive slave gets the actual values.
m
the coupling command master, the torque set value master and torque init stress ac-
tual value master (optional) must be mapped in the drive master and the drive slave
in the same address area.
Axis internal cross communication within a double axis unit
In order to activate the axis internal cross communication within a double axis unit
Bit 4 = 1 must be set on slave axis. Which of the two axes 1 and 2 assumes the
master functionality and which the slave functionality is always equal. It is recommended
to configure axis 1 as master and axis 2 as slave because dead time does not effect then.
The cross communication can be realized on a double axis also via fieldbus (see
Figure 75:
Axis internal cross communication
EtherCAT
EtherCAT
5000_0181_rev02_int.cdr
Control
EtherCAT master
Drive master
EtherCAT slave 1
Actual values
P147.4 Coupling command master
P147.19 Torque set value master
(P147.21 Torque init stress
actual value master)
Drive slave
EtherCAT slave 2
EtherCAT
cross communication
Set values
P147.4 Coupling command master
P147.19 Torque set value master
(P147.21 Torque init stress
actual value master)
Transfer P147.21 at direct torque init stress only (P147.1 Bit 16 = 1)
5000_0182_rev02_int.cdr
Control
Fieldbus master
Drive master
Fieldbus slave 1
Drive slave
Fieldbus slave 2
Fieldbus
Fieldbus
Internal cross
communication
(double axis only)
Actual values
P147.4 Coupling command master
P147.19 Torque set value master
(P147.21 Torque init stress
actual value master)
Set values
P147.4 Coupling command master
P147.19 Torque set value master
(P147.21 Torque init stress
actual value master)
Transfer P147.21 at direct torque init stress only (P147.1 Bit 16 = 1)







































































