





























Description of the Software Modules and Parameters
Parameter manual
b maXX
BM5800
Document No.: 5.16029.03
259
3
3.4.15.2 Description of the Parameters
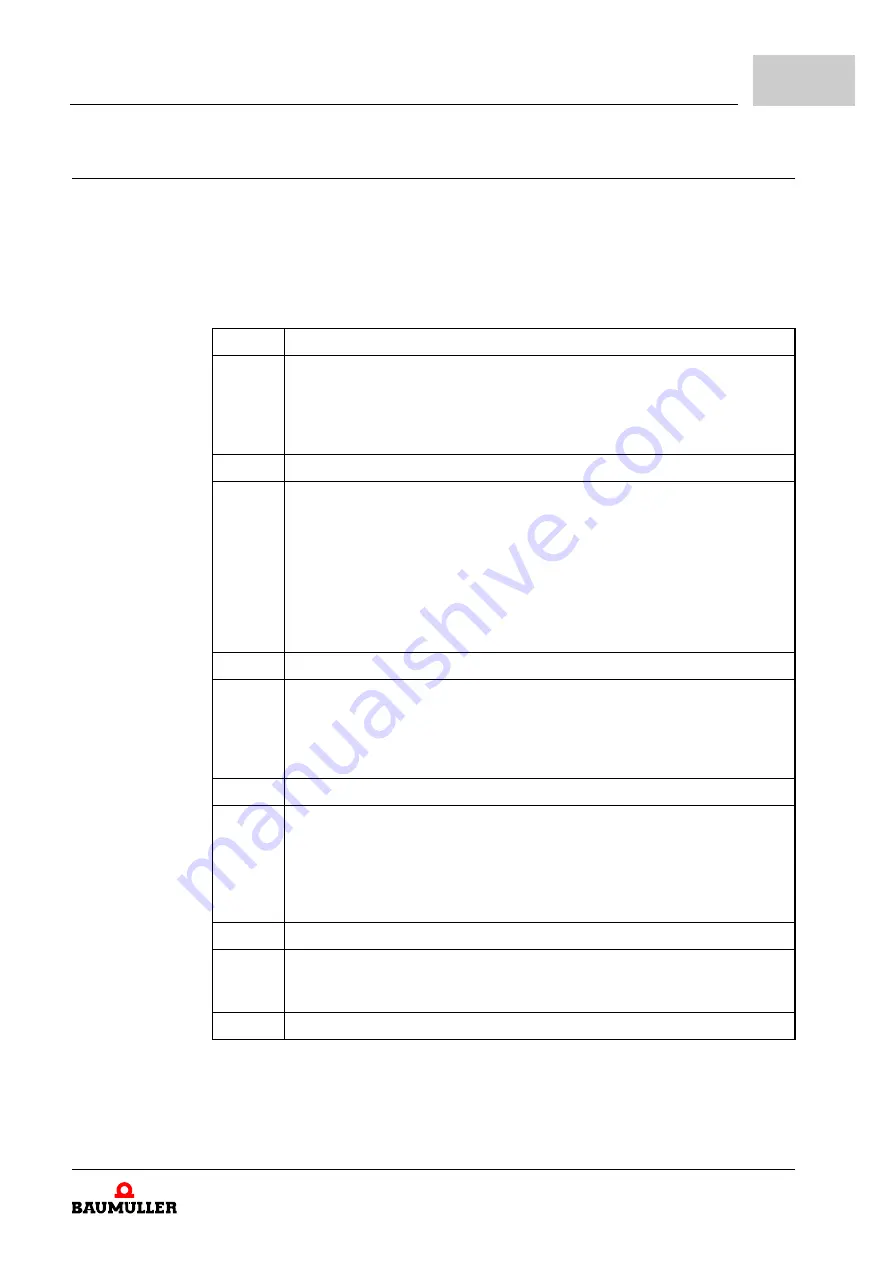
147.1
Mode
Configuration of the torque coupling
Bit
Meaning
1 ... 0
Specification of the configuration:
00: No torque coupling
01: Drive assumes the master functionality
10: Drive assumes the slave functionality
11: Reserved
3 ... 2
Reserved
4
Master-slave communication (at slave functionality only, i.e. Bit 1...0 = 10)
Transfer of the values / commands between master and slave:
0: external
Values are transferred via fieldbus
1: internal
Values are transferred directly from axis to axis without external connec-
tion; possible at double axis unit only
It is recommended here to set master functionality to axis 1 and slave
functionality to axis 2.
7 ... 5
Reserved
8
Coupling standby switch on / switch off (possible only at master functionality,
i.e. Bit 1...0 = 01). Slave-side the coupling is efficiently not before master and
slave are enabled:
0: Coupling standby switch off
1: Coupling standby switch on
11 ... 9
Reserved
12
Activate/deactivate the speed dependent torque init stress (at slave function-
ality only, i.e. Bit 1...0 = 10)
0: Torque init stress is independent from the speed (only
Torque
init stress 0 is efficient)
1: Torque init stress is connected speed dependent (ramp is efficient corre-
15 ... 13 Reserved
16
Switching on and generating the torque init stress
0: Torque init stress acts via compensating controller
a)
1: Torque init stress acts directly on the torque set values
b)
a)
Torque init stress must be parameterized to slave
b)
Torque init stress must be parameterized to master, transfer via cross commu-
nication is needed, if master slave communication is externally (see Bit 4)
31 ... 17 Reserved







































































