





























Configuration
Parameter manual
b maXX
BM5800
Document No.: 5.16029.03
Baumüller Nürnberg GmbH
148
3.4
3.4.6.6 Encoder accuracy and excentricity
To increase the absolute accuracy in the drives and to reduce the vibrations at rotational
frequency the encoder angle can be improved by an angular-dependent correction value.
Vibrations may occur in the speed, with the frequency of the present speed, if the encoder
is not exactly aligned centrically towards the motor shaft, for example. The control error,
which was caused by an encoder excentricity, cannot be corrected by the positioning con-
troller or by the speed controller. The control error can be approximated by a sinusoidal
function. Thus, the control error is suppressed on the encoder angle by adding an addi-
tional angle with a sinusoidal function.
Encoders providing a low resolution such as resolvers are imprecise in their absolute ac-
curacy. In the controller the basic vibration (1st harmonic vibration) as well as other har-
monic (up to the 4th harmonic vibration) angular displacements can be compensated. For
this purpose the amplitude and the phase of the correction function must be entered in
and
and
(higher har-
monic vibrations). The maximum harmonic vibration to be corrected is specified by
whereat 0 is the 1st harmonic vibration. The correction is enabled by bit 6 of
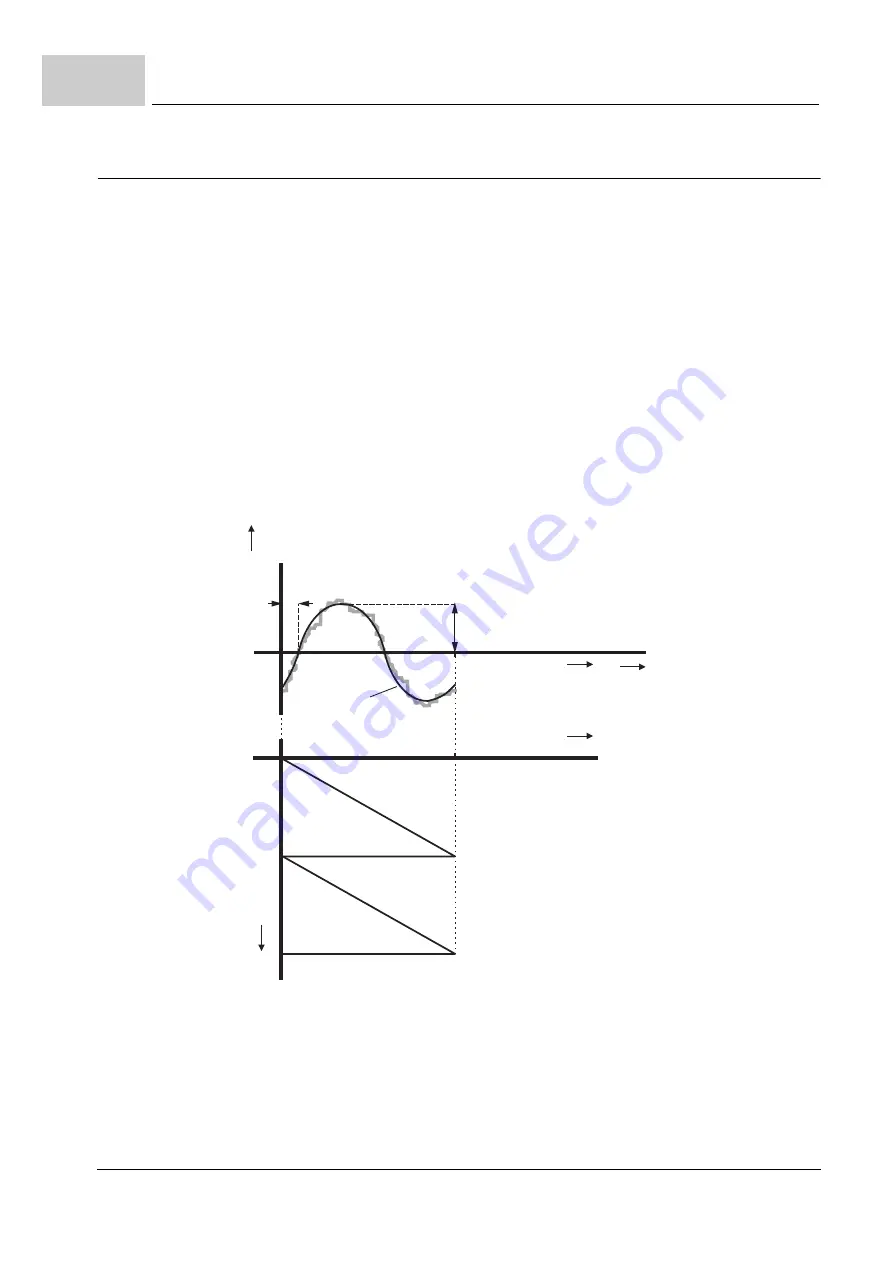
Figure 55:
Encoder excentricity
Determination is carried out in current control. The setpoint frequency (speed) must be
constant. It must lie between 0.1 and 500 Hz.
0
2
p
t
t
0
2
p
0
a)
b)
5000_0231_rev02
0
2
p
0
2
p
0
a)
b)
Encoder excentricity
Phase shifting 106.70
Encoder excentricity
a
106.71
mplitude
Position actual
value 106.10
(angle)
Position actual
value 106.10
(angle)
Position
deviation
angle
18.61
Approximation
2
p
a) Error of encoder excentricity and its approach
b) Variation of the position value angle







































































