
























7. SPECIAL ADJUSTMENT FUNCTIONS
7 - 12
Step 1 Select "Manual setting (_ _ _ 2)" of "Vibration suppression control 1 tuning mode selection" or
"Manual setting (_ _ 2 _)" of "Vibration suppression control 2 tuning mode selection" in [Pr.
PB02].
Step 2 Set "Vibration suppression control - Vibration frequency" and "Vibration suppression control -
Resonance frequency" as follows.
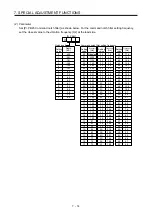
However, the value of [Pr. PB07 Model loop gain], vibration frequency, and resonance frequency have
the following usable range and recommended range.
Vibration suppression
control
Usable range
Recommended setting range
Vibration suppression
control 1
[Pr. PB19] > 1/2
π
× (0.9 × [Pr. PB07])
[Pr. PB20] > 1/2
π
× (0.9 × [Pr. PB07])
[Pr. PB19] > 1/2
π
× (1.5 × [Pr. PB07])
[Pr. PB20] > 1/2
π
× (1.5 × [Pr. PB07])
Vibration suppression
control 2
When [Pr. PB19] < [Pr. PB52],
[Pr. PB52] > (5.0 + 0.1 × [Pr. PB07])
[Pr. PB53] > (5.0 + 0.1 × [Pr. PB07])
1.1 < [Pr. PB52]/[Pr. PB19] < 5.5
[Pr. PB07] < 2
π
(0.3 × [Pr. PB19] + 1/8 × [Pr. PB52])
When [Pr. PB19] < [Pr. PB52],
[Pr. PB52], [Pr. PB53] > 6.25 Hz
1.1 < [Pr. PB52]/[Pr. PB19] < 4
[Pr. PB07] < 1/3 × (4 × [Pr. PB19] + 2 × [Pr. PB52])
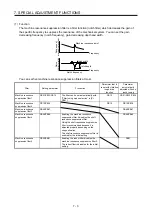
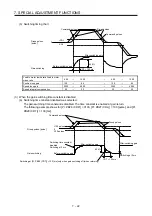
(a) When a vibration peak can be confirmed with machine analyzer using MR Configurator2, or external
equipment.
1 Hz
Gain characteristics
Phase
-90 degrees
300 Hz
Vibration suppression control 1 -
Vibration frequency
(anti-resonance frequency)
[Pr. PB19]
Vibration suppression control 1 -
Resonance frequency
[Pr. PB20]
Vibration suppression control 2 -
Vibration frequency
(anti-resonance frequency)
[Pr. PB52]
Vibration suppression control 2 -
Resonance frequency
[Pr. PB53]
Resonance of more than
300 Hz is not the target of control.
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































