







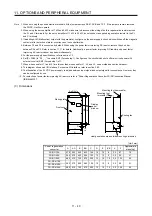







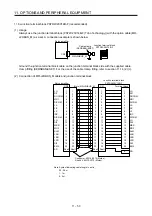




11. OPTIONS AND PERIPHERAL EQUIPMENT
11 - 38
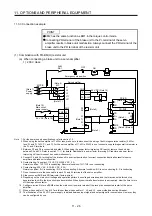
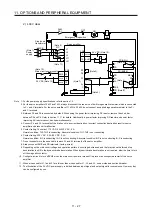
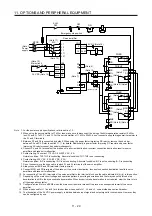
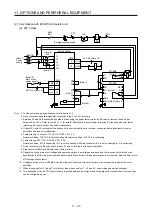
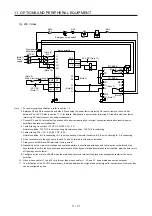
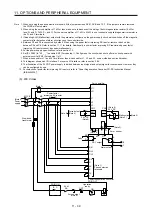
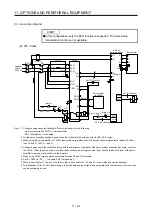
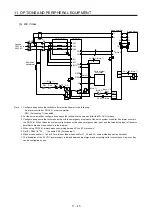
(2) Connection example
POINT
In this configuration, only the STO function is supported. The forced stop
deceleration function is not available.
(a) 200 V class
P3 P4
C
N-
P+
N/-
P/+
RD
SE
MC
MCCB
RX
R
SX
S
TX
T
R/L1
S/L2
T/L3
B
C
EM1
DICOM
CN3
DOCOM
ALM
CN3
RA
B C
FR-RC
ALM
RA
MC
MC
SK
L11
L21
L1
L2
L3
A
B
C
(Note 1)
Phase detection
terminals
(Note 4)
Ready
Alarm
output
RDY output
(Note 7)
(Note 5)
Power
supply
24 V DC (Note 9)
Malfunction
(Note 3)
Power factor
improving reactor
(Note 10)
Forced stop 1
(Note 6)
Power regeneration converter
FR-RC
Operation ready
OFF
ON
Forced stop 1
(Note 6)
Servo amplifier
(Note 2)
5 m or less
(Note 8)
(Note 8)
24 V DC (Note 9)
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































