



















11. OPTIONS AND PERIPHERAL EQUIPMENT
11 - 62
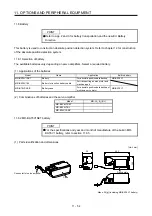
11.8.4 MR-BT6VCASE battery case
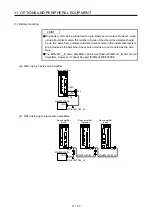
POINT
The battery unit consists of an MR-BT6VCASE battery case and five MR-
BAT6V1 batteries.
For the specifications and year and month of manufacture of MR-BAT6V1
battery, refer to section 11.8.5.
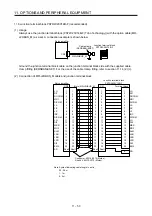
MR-BT6VCASE is a case used for connecting and mounting five MR-BAT6V1 batteries. A battery case does
not have any batteries. Please prepare MR-BAT6V1 batteries separately.
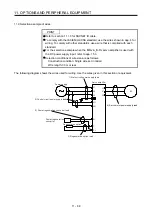
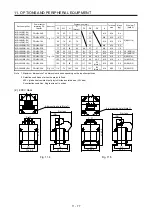
(1) The number of connected servo motors
One MR-BT6VCASE holds absolute position data up to eight axes servo motors. For direct drive motors,
up to four axes can be connected. Servo motors and direct drive motors in the incremental system are
included as the axis Nos. Linear servo motors are not counted as the axis Nos. Refer to the following
table for the number of connectable axes of each servo motor.
Servo motor
Number of axes
Rotary
servo
motor
0 1 2 3 4 5 6 7 8
Direct
drive
motor
4 4 4 4 4 3 2 1 0
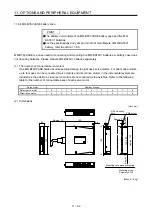
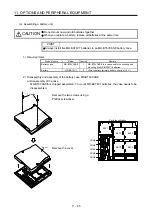
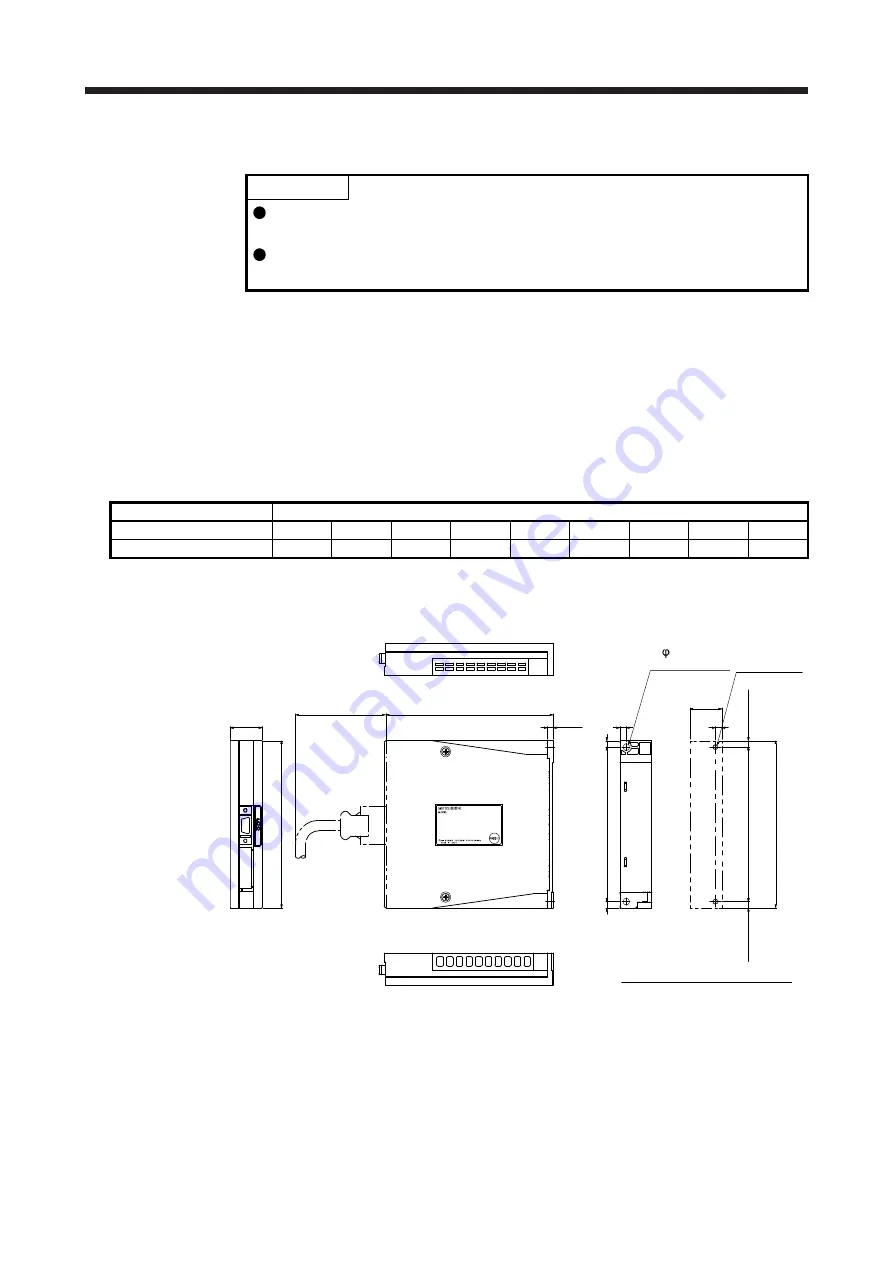
(2) Dimensions
[Unit: mm]
Mounting hole process drawing
2-M4 screw
Approx. 25
Approx. 130
Approx.5
Approx. 5
120 ± 0.5
5
5
5
130
Approx. 70
25
130
4.6
120
5
2- 5 mounting
hole
Mounting screw
Screw size: M4
[Mass: 0.18 kg]
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































