




























6. NORMAL GAIN ADJUSTMENT
6 - 8
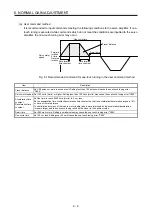
(a) User command method
It is recommended to input commands meeting the following conditions to the servo amplifier. If one-
touch tuning is executed while commands which do not meet the conditions are inputted to the servo
amplifier, the one-touch tuning error may occur.
Servo motor
speed
Forward
rotation
0 r/min
Reverse
rotation
One cycle time
Dwell time
Deceleration
time constant
Travel distance
Acceleration
time constant
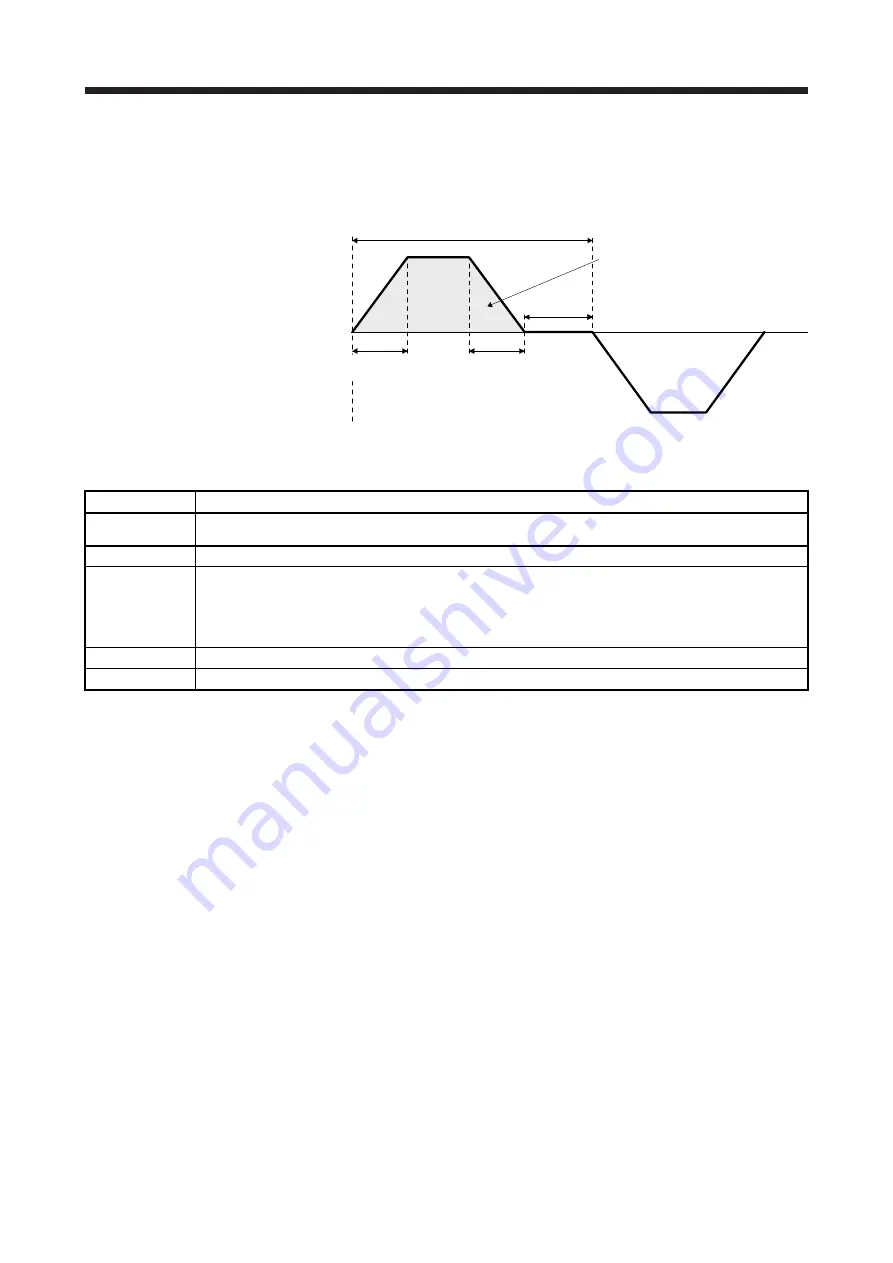
Fig. 6.1 Recommended command for one-touch tuning in the user command method
Item Description
Travel distance
Set 100 pulses or more in encoder unit. Setting less than 100 pulses will cause the one-touch tuning error
"C004".
Servo motor speed Set 150 r/min (mm/s) or higher. Setting less than 150 r/min (mm/s) may cause the one-touch tuning error "C005".
Acceleration time
constant
Deceleration time
constant
Set the time to reach 2000 r/min (mm/s) to 5 s or less.
Set an acceleration time constant/deceleration time constant so that the acceleration/deceleration torque is 10%
or more of the rated torque.
The estimation accuracy of the load to motor inertia ratio is more improved as the acceleration/deceleration
torque is larger, and the one-touch tuning result will be closer to the optimum value.
Dwell time
Set 200 ms or more. Setting a smaller value may cause the one-touch tuning error "C004".
One cycle time
Set 30 s or less. Setting over 30 s will cause the one-touch tuning error "C004".
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































