

















11. OPTIONS AND PERIPHERAL EQUIPMENT
11 - 40
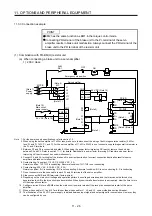
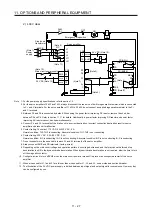
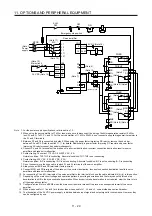
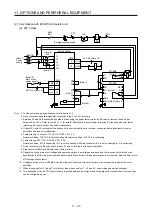
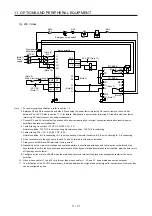
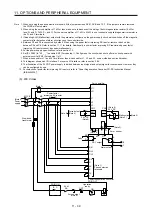
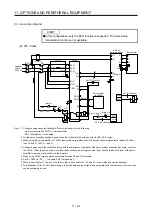
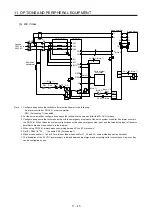
Note 1. When not using the phase detection terminals, fit the jumpers across RX-R, SX-S and TX-T. If the jumpers remain removed,
the FR-RC-H will not operate.
2. When using the servo amplifier of 7 kW and 5 kW, make sure to disconnect the wiring of built-in regenerative resistor across
the P+ and C terminals. For the servo amplifier of 11 kW to 22 kW, do not connect a supplied regenerative resistor to the P+
and C terminals.
3. If disabling ALM (Malfunction) output with the parameter, configure up the power supply circuit which switches off the magnetic
contactor after detection of alarm occurrence on the controller side.
4. Between P3 and P4 is connected by default. When using the power factor improving DC reactor, remove the short bar
between P3 and P4. Refer to section 11.11 for details. Additionally, a power factor improving DC reactor and power factor
improving AC reactor cannot be used simultaneously.
5. For the power supply specifications, refer to section 1.3.
6. Set [Pr. PA04] to "0 0 _ _" to enable EM1 (Forced stop 1). Configure up the circuit which shuts off main circuit power with
external circuit at EM1 (Forced stop 1) off.
7. When wires used for L11 and L21 are thinner than wires used for L1, L2, and L3, use a molded-case circuit breaker.
8. This diagram shows sink I/O interface. For source I/O interface, refer to section 3.8.3.
9. The illustration of the 24 V DC power supply is divided between input signal and output signal for convenience. However, they
can be configured by one.
10. For selection of power factor improving AC reactors, refer to "Power Regeneration Converter FR-RC Instruction Manual
(IB(NA)66330)".
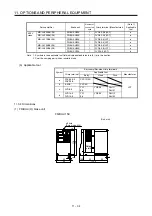
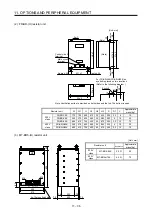
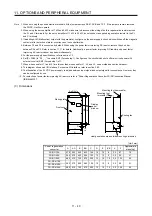
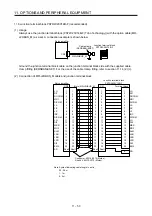
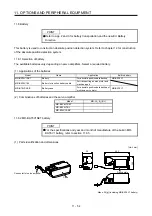
(3) Dimensions
AA
A
C
F
K
EE
BA
B
E
D
2-
φ
D hole
Rating plate
Front cover
Display
panel
window
Mounting foot (removable)
Mounting foot
(movable)
Cooling fan
Heat generation area outside mounting dimension
[Unit: mm]
Power regeneration
converter
A AA B BA C D E EE K F
Approximate
mass [kg]
FR-RC-15K
270 200 450 432 195 10 10 8 3.2 87
19
FR-RC-30K
340 270 600 582 195 10 10 8 3.2 90
31
FR-RC-55K
480 410 700 670 250 12 15 15 3.2 135
55
FR-RC-H15K
340 270 600 582 195 10 10 8 3.2 90
31
FR-RC-H30K
FR-RC-H55K
480 410 700 670 250 12 15 15 3.2 135
55
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































