

























7. SPECIAL ADJUSTMENT FUNCTIONS
7 - 8
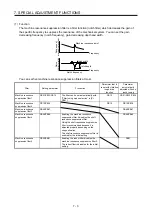
7.1.4 Low-pass filter
(1) Function
When a ball screw or the like is used, resonance of high frequency may occur as the response level of
the servo system is increased. To prevent this, the low-pass filter is enabled for a torque command as a
default. The filter frequency of the low-pass filter is automatically adjusted to the value in the following
equation.
Filter frequency ([rad/s]) =
1 + GD2
VG2
× 10
However, when an automatically adjusted value is smaller than VG2, the filter frequency will be the VG2
value. To set [Pr. PB18] manually, select "Manual setting (_ _ 1 _)" of "Low-pass filter selection" in [Pr.
PB23].
(2) Parameter
Set "Low-pass filter selection" in [Pr. PB23].
[Pr. PB23]
Low-pass filter selection
0: Automatic setting
1: Manual setting
2: Disabled
0 0
0
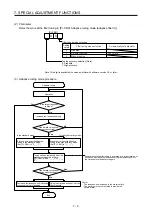
7.1.5 Advanced vibration suppression control II
POINT
The function is enabled when "Gain adjustment mode selection" in [Pr. PA08] is
"Auto tuning mode 2 (_ _ _ 2)", "Manual mode (_ _ _ 3)", or "2 gain adjustment
mode 2 (_ _ _ 4)".
The machine resonance frequency supported in the vibration suppression
control tuning mode is 1.0 Hz to 100.0 Hz. As for the vibration out of the range,
set manually.
Stop the servo motor before changing the vibration suppression control-related
parameters. Otherwise, it may cause an unexpected operation.
For positioning operation during execution of vibration suppression control
tuning, provide a stop time to ensure a stop after vibration damping.
Vibration suppression control tuning may not make normal estimation if the
residual vibration at the servo motor side is small.
Vibration suppression control tuning sets the optimum parameter with the
currently set control gains. When the response setting is increased, set vibration
suppression control tuning again.
When using the vibration suppression control 2, set "_ _ _ 1" in [Pr. PA24].
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































