






















17. APPLICATION OF FUNCTIONS
17 - 63
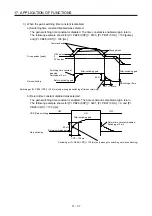
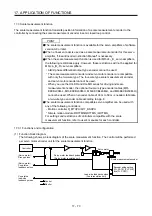
b) When the bus voltage does not decrease lower than Undervoltage level within the
instantaneous power failure time of the control circuit power supply
The operation continues without alarming.
Bus voltage
Undervoltage level
(Note)
ALM
(Malfunction)
MTTR
(During tough drive)
MBR
(Electromagnetic
brake interlock)
Base circuit
WNG
(Warning)
[Pr. PX28]
Instantaneous power failure time of the
control circuit power supply
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Control circuit
power supply
ON (energization)
OFF (power failure)
Note. Refer to table 17.8 for the undervoltage level.
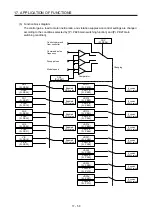
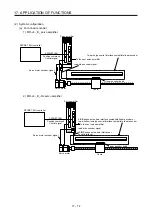
(8) Compliance with SEMI-F47 standard
POINT
The control circuit power supply of the servo amplifier can be possible to comply
with SEMI-F47 standard. However, a back-up capacitor may be necessary for
instantaneous power failure in the main circuit power supply depending on the
power supply impedance and operating situation.
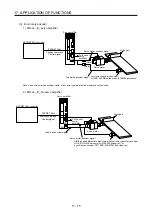
Use a 3-phase for the input power supply of the servo amplifier. Using a 1-phase
100 V AC/200 V AC for the input power supply will not comply with SEMI-F47
standard.
The external dynamic brake cannot be used for compliance with SEMI-F47
standard. Do not assign DB (Dynamic brake interlock) in [Pr. PD07] to [Pr.
PD09]. Failure to do so will cause the servo amplifier to become servo-off when
an instantaneous power failure occurs.
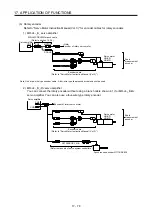
Be sure to perform actual machine tests and detail checks for power supply
instantaneous power failure of SEMI-F47 standard with your equipment.
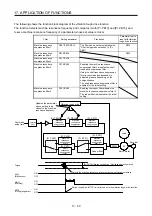
The following explains the compliance with "SEMI-F47 semiconductor process equipment voltage sag
immunity test" of MR-J4 series.
This function enables to avoid triggering [AL. 10 Undervoltage] using the electrical energy charged in the
capacitor in case that an instantaneous power failure occurs during operation.
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































