












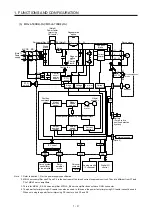
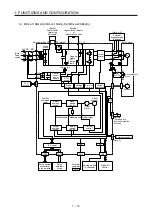

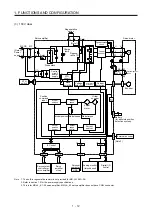










1. FUNCTIONS AND CONFIGURATION
1 - 6
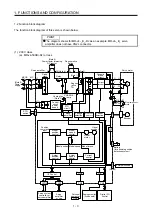
(c) MR-J4-11KB(-RJ)/MR-J4-15KB(-RJ)/MR-J4-22KB(-RJ)
L11
L21
Encoder
N-
C
Power factor improving
DC reactor
MC
MCCB
CN5
USB
USB
CN1A
CN1B
D/A
CN3
P3
P4 (Note 2)
P+
+
+
B
RA
B1
B2
CN4
M
CN2
CN8
Servo motor
External regenerative
resistor or
regenerative option
L3
L2
L1
U
U
U
(Note 3)
Thyristor
(Note 4, 6)
External dynamic
brake (optional)
U
V
W
U
V
W
(Note 5)
Model position
Current
control
Actual
position
control
Actual
speed
control
Virtual
motor
Virtual
encoder
Cooling fan
Current
detection
Overcurrent
protection
Voltage
detection
(Note 1)
Power
supply
Base
amplifier
STO
circuit
Personal
computer
Servo system
controller or
servo amplifier
Servo
amplifier
or cap
Analog monitor
(2 channels)
Position
command
input
Servo amplifier
24 V DC
Battery
(for absolute position
detection system)
STO
switch
Model speed Model torque
Control
circuit
power
supply
Model
position
control
Model
speed
control
I/F Control
CHARGE
lamp
Regene-
rative
TR
Current
encoder
Digital I/O
control
Step-
down
circuit
Electromagnetic
brake
Diode
stack
CN2L
External encoder
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































