





























APPENDIX
App. - 71
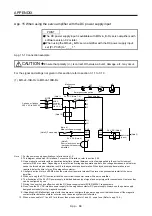
App. 15.4 Molded-case circuit breakers, fuses, magnetic contactors
(1) For main circuit power supply
CAUTION
To prevent the servo amplifier from smoke and a fire, select a molded-case circuit
breaker which shuts off with high speed.
Always use one molded-case circuit breaker and one magnetic contactor with one
servo amplifier.
When using a fuse instead of the molded-case circuit breaker, use the one having the specifications
given in this section.
Servo amplifier
Molded-case circuit breaker (Note 1)
Fuse
Magnetic
contactor
(Note 2)
Frame, rated current
Voltage AC
[V]
Class Current
[A]
Voltage DC
[V]
Power factor
improving reactor is
not used
Power factor
improving reactor is
used
MR-J4-10B-RJ
30 A frame 5 A
30 A frame 5 A
240 T
10
400
DUD-N30
MR-J4-20B-RJ
30 A frame 5 A
30 A frame 5 A
MR-J4-40B-RJ
30 A frame 10 A
30 A frame 5 A
15
MR-J4-60B-RJ
30 A frame 15 A
30 A frame 10 A
20
MR-J4-70B-RJ
30 A frame 15 A
30 A frame 10 A
MR-J4-100B-RJ
(3-phase power
supply input)
30 A frame 15 A
30 A frame 10 A
MR-J4-100B-RJ
(1-phase power
supply input)
30 A frame 15 A
30 A frame 15 A
MR-J4-200B-RJ
30 A frame 20 A
30 A frame 20 A
30
MR-J4-350B-RJ
30 A frame 30 A
30 A frame 30 A
40
MR-J4-500B-RJ
50 A frame 50 A
50 A frame 50 A
60
DUD-N60
MR-J4-700B-RJ
100 A frame 75 A
60 A frame 60 A
80
MR-J4-11KB-RJ
100 A frame 100 A
100 A frame 100 A
125
DUD-N120
MR-J4-15KB-RJ
125 A frame 125 A
125 A frame 125 A
175
MR-J4-22KB-RJ
225 A frame 175 A
225 A frame 175 A
300
DUD-N180
Note 1. Use a molded-case circuit breaker having the operation characteristics equal to or higher than Mitsubishi Electric general-
purpose products.
2. Use a magnetic contactor with an operation delay time (interval between current being applied to the coil until closure of
contacts) of 80 ms or less.
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































