

























APPENDIX
App. - 26
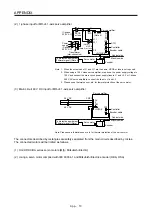
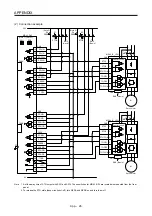
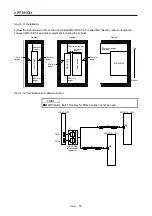
(2) Connection example
STO1
4
5
3
6
7
8
CN3
EM2 (B-axis)
CN8
SDO1A+
4A
4B
SDO1A-
SDI1A+
1A
1B
SDI1A-
SDI2A+
SRESA+
SDO2A+
TOFA
3A
3B
1A
1B
6A
6B
8A
SDI2A-
SDO2A-
SRESA-
CN9
CN10
STO1
TOFB2
TOFCOM
STO2
STOCOM
TOFB1
MR-J4_B_(-RJ)
FG
4
5
3
6
7
8
CN3
EM2 (A-axis)
CN8
TOFB2
TOFCOM
STO2
STOCOM
TOFB1
MR-J4_B_(-RJ)
SDO1B+
3A
3B SDO1B-
SDI1B+
2A
2B
SDI1B-
SDI2B+
SRESB+
SDO2B+
TOFB
4A
4B
2A
2B
5A
5B
8B
+24V
7A
0V
7B
SDI2B-
SDO2B-
SRESB-
CN9
CN10
MR-J3-D05
S1
24 V
0 V
STOA
S3
STOB
MC
M
Servo motor
MC
M
Servo motor
Control circuit
Control circuit
CN8A
CN8B
EM2
(A-axis)
EM2
(B-axis)
SW1
SW2
(Note 1) (Note 1)
(Note 2)
(Note 2)
RESA
RESB
S4
S2
Note 1. Set the delay time of STO output with SW1 and SW2. These switches for MR-J3-D05 are located where dented from the front
panel.
2. To release the STO state (base circuit shut-off), turn RESA and RESB on and turn them off.
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...