




















3. SIGNALS AND WIRING
3 - 17
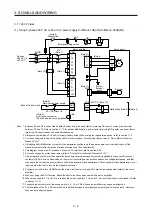
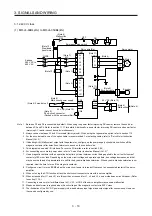
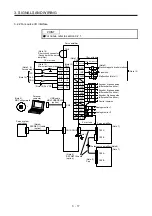
3.2.2 For source I/O interface
POINT
For notes, refer to section 3.2.1.
10
20
EM2
2
19
12
DI1
DI3
DI2
3
DOCOM
9
INP
15 ALM
6
LA
16 LAR
7
LB
17 LBR
8
LZ
18
LZR
11
LG
RA1
RA2
5
DICOM
DICOM
MO1
LG
MO2
4
1
14
SD
Plate
CN8
RA3
CN1A
CN1B
(Note 12)
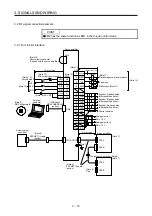
Servo amplifier
CN3
(Note 12)
(Note 14)
FLS
RLS
DOG
(Note 13)
Encoder A-phase pulse
(differential line driver)
Encoder B-phase pulse
(differential line driver)
Encoder Z-phase pulse
(differential line driver)
CN3
(Note 2)
Electromagnetic brake interlock
Malfunction (Note 11)
In-position
Control common
(Note 15)
Main circuit power supply
Personal
computer
CN5
(Note 5)
MR Configurator2
+
USB cable
MR-J3USBCBL3M
(option)
(Note 10) 24 V DC
Analog monitor 1
Analog monitor 2
2 m or less
(Note 16)
Short-circuit connector
(Packed with the servo
amplifier)
10 m or less
10 m or less
Servo amplifier
(Note 3, 4)
Forced stop 2
(Note 6)
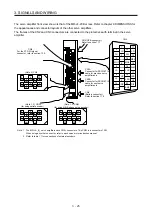
SSCNET III cable
(option)
Servo system
controller
(Note 7)
(Note 1)
(Note 9)
Cap
CN1A
CN1B
The last servo amplifier (Note 8)
CN1B
CN1A
(Note 6)
SSCNET III cable
(option)
(Note 7)
24 V DC (Note 10)
13 MBR
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































