
















11. OPTIONS AND PERIPHERAL EQUIPMENT
11 - 75
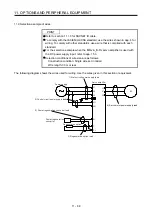
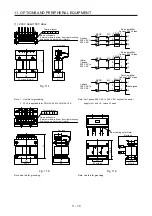
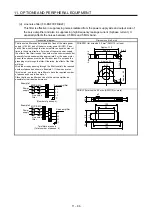
The Type E Combination motor controller can also be used instead of a molded-case circuit breaker.
Servo amplifier
Rated input
voltage AC [V]
Input phase
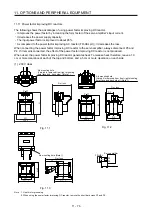
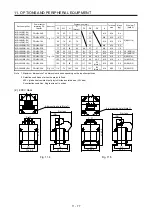
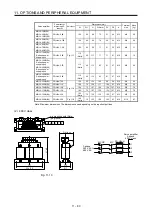
Type E Combination motor controller
SCCR
[kA]
Model
Rated
voltage
AC [V]
Rated current
[A]
(Heater design)
MR-J4-10B(-RJ)
200 to 240
3-phase
MMP-T32
240
1.6
50
MR-J4-20B(-RJ)
2.5
MR-J4-40B(-RJ)
4
MR-J4-60B(-RJ)
6.3
MR-J4-70B(-RJ)
6.3
MR-J4-100B(-RJ)
8
MR-J4-200B(-RJ)
18
MR-J4-350B(-RJ)
25
25
MR-J4-500B(-RJ)
32
MR-J4-60B4(-RJ)
380 to 480
3-phase
480Y/277
2.5
50
MR-J4-100B4(-RJ)
4
MR-J4-200B4(-RJ)
8
MR-J4-350B4(-RJ)
13
MR-J4-500B4(-RJ)
18
MR-J4-700B4(-RJ)
25 25
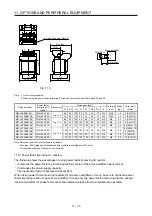
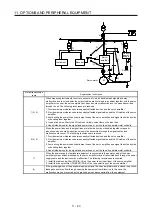
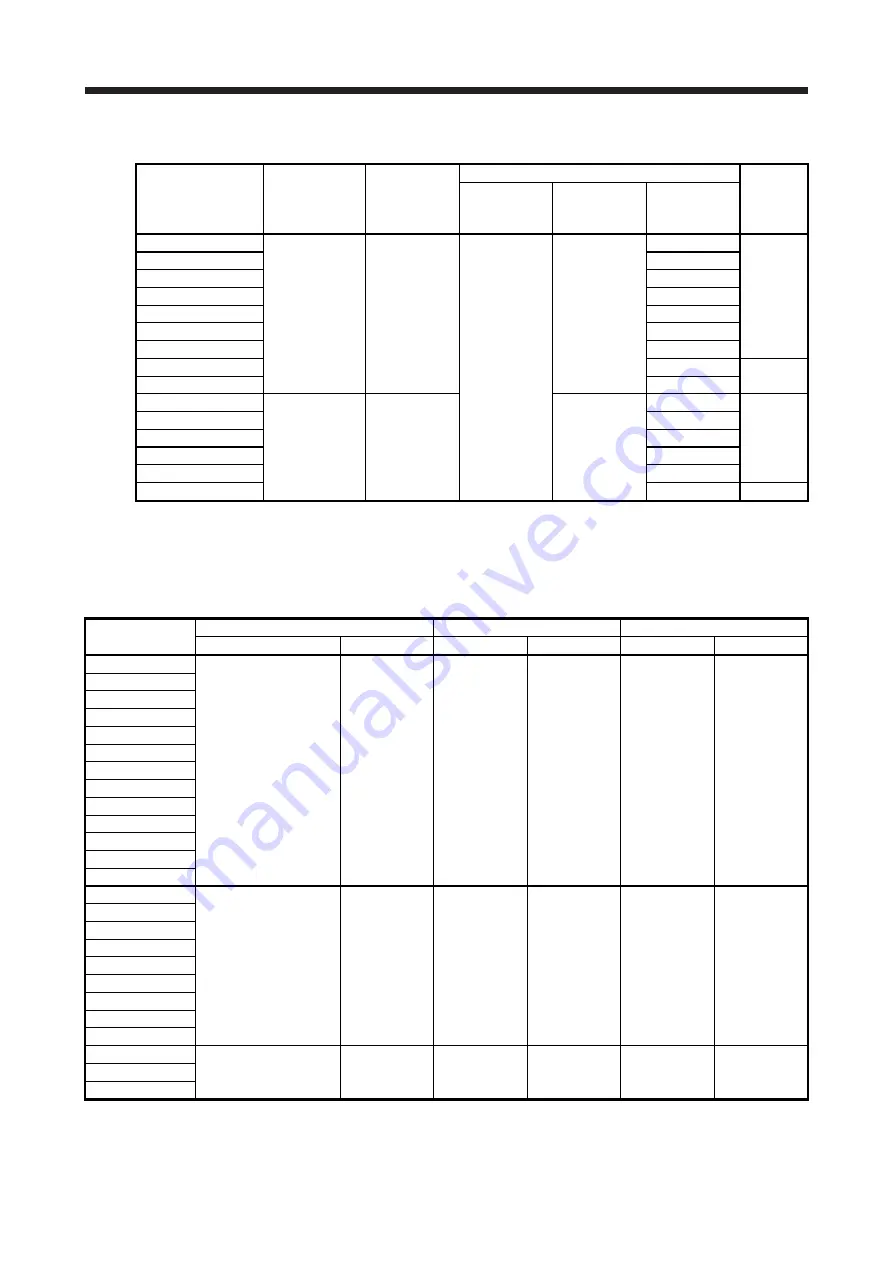
(2) For control circuit power supply
When the wiring for the control circuit power supply (L11/L21) is thinner than that for the main circuit
power supply (L1/L2/L3), install an overcurrent protection device (molded-case circuit breaker or fuse) to
protect the branch circuit.
Servo amplifier
Molded-case circuit breaker (Note)
Fuse (Class T)
Fuse (Class K5)
Frame, rated current
Voltage AC [V]
Current [A]
Voltage AC [V]
Current [A]
Voltage AC [V]
MR-J4-10B(-RJ)
MR-J4-20B(-RJ)
MR-J4-40B(-RJ)
MR-J4-60B(-RJ)
MR-J4-70B(-RJ)
MR-J4-100B(-RJ)
MR-J4-200B(-RJ) 30 A frame 5 A
240
1
300
1
250
MR-J4-350B(-RJ)
MR-J4-500B(-RJ)
MR-J4-700B(-RJ)
MR-J4-11KB(-RJ)
MR-J4-15KB(-RJ)
MR-J4-22KB(-RJ)
MR-J4-60B4(-RJ)
MR-J4-100B4(-RJ)
MR-J4-200B4(-RJ)
MR-J4-350B4(-RJ)
MR-J4-500B4(-RJ) 30 A frame 5 A
480
1
600
1
600
MR-J4-700B4(-RJ)
MR-J4-11KB4(-RJ)
MR-J4-15KB4(-RJ)
MR-J4-22KB4(-RJ)
MR-J4-10B1(-RJ)
MR-J4-20B1(-RJ) 30 A frame 5 A
240
1
300
1
250
MR-J4-40B1(-RJ)
Note. When having the servo amplifier comply with the IEC/EN/UL/CSA standard, refer to app. 4.
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































