



























APPENDIX
App. - 58
App. 11.1.3 Specifications
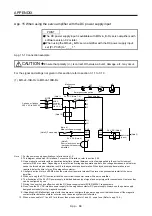
Dynamic brake which is built in 7 kW or smaller servo amplifiers is removed.
Take safety measures such as making another circuit for an emergency stop, alarm occurrence, and power
shut-off.
The following servo motors may function an electronic dynamic brake at an alarm occurrence.
Series Servo
motor
HG-KR HG-KR053/HG-KR13/HG-KR23/HG-KR43
HG-MR HG-MR053/HG-MR13/HG-MR23/HG-MR43
HG-SR HG-SR51/HG-SR52
Setting the following parameter disables the electronic dynamic brake.
Servo amplifier
Parameter
Setting value
MR-J4-_B_-ED
MR-J4-_B_-RU
[Pr. PF06]
_ _ _ 2
When [Pr. PA04] is "2 _ _ _" (default), the motor can be a state of forced stop deceleration at an alarm
occurrence. Setting "0 _ _ _" in [Pr. PA04] disables the forced stop deceleration function.
App. 11.2 Without regenerative resistor
App. 11.2.1 Summary
This section explains servo amplifiers without a regenerative resistor. The things not explained in this section
will be the same as MR-J4-_B_(-RJ).
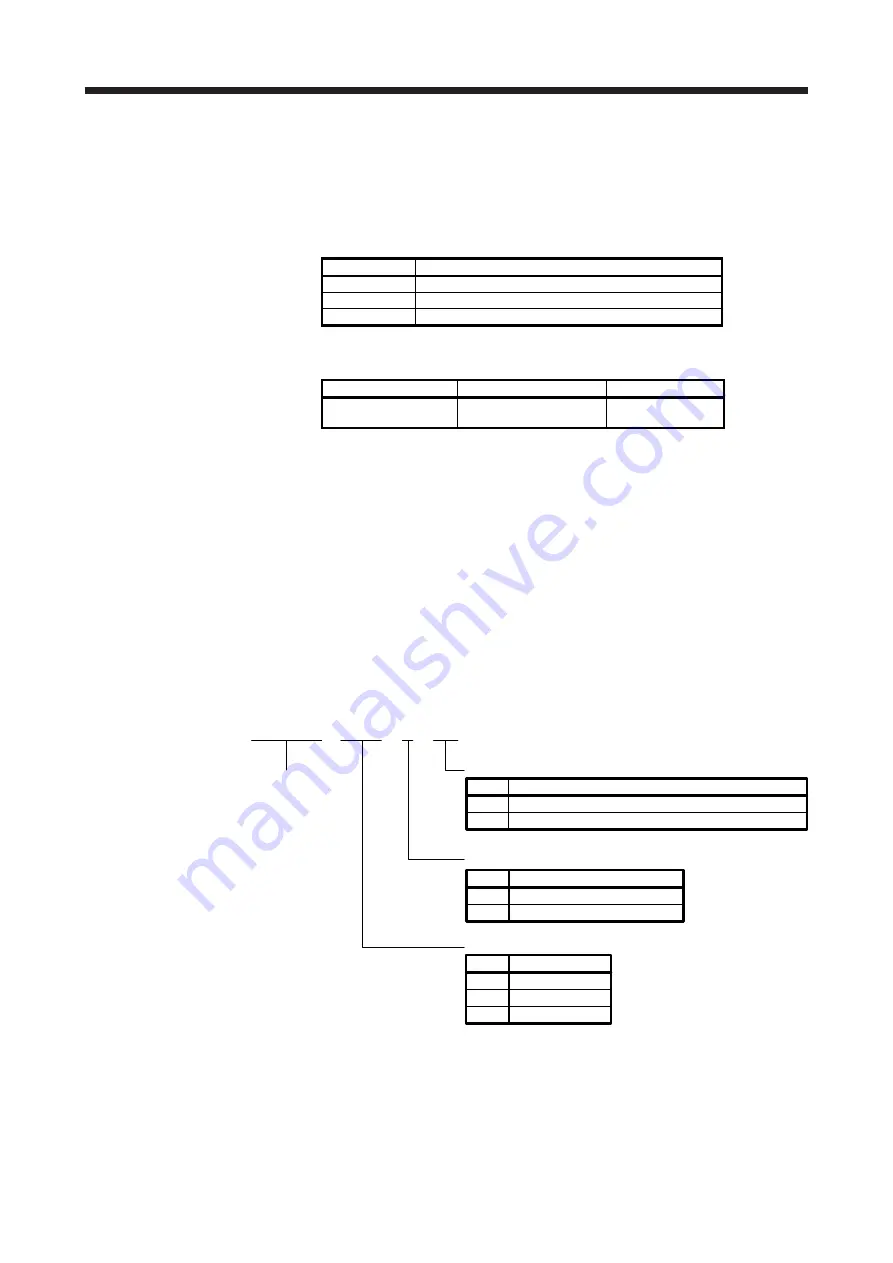
App. 11.2.2 Model
The following describes what each block of a model name indicates. Not all combinations of the symbols are
available.
Series
Rated output
Symbol Rated output [kW]
11K
11
15K
15
22K
22
Power supply
Symbol
Power supply
None 3-phase 200 V AC to 240 V AC
4
3-phase 380 V AC to 480 V AC
Special specifications
Symbol
Special specifications
MR-J4-_B_-RJ without regenerative resistor
RZ
PX
MR-J4-_B_ without regenerative resistor
M R
K
J
B
P X
1 1
4
4 -
-
-
App. 11.2.3 Specifications
Indicates a servo amplifier of 11 kW to 22 kW that does not use a regenerative resistor as standard
accessory. When using any of these servo amplifiers, always use the MR-RB5R, MR-RB9F, MR-RB9T, MR-
RB5K-4, or MR-RB6K-4 regenerative option.
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































