



























14. USING A LINEAR SERVO MOTOR
14 - 17
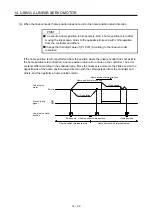
3) Linear servo motor movement (when FLS (Upper stroke limit) or RLS (Lower stroke limit) is off)
When FLS or RLS is off at servo-on, the magnetic pole detection is carried out as follows.
RLS
FLS
(Note)
Magnetic pole detection completion position
Magnetic pole detection
start position
Servo-on
position
The linear servo motor moves to a
magnetic pole detection start position
upon servo-on, and the magnetic pole
detection is executed.
The linear servo motor reciprocates several times and returns
to the magnetic pole detection start position to complete the
magnetic pole detection and to go into the servo-lock status.
At this time, there may be a gap, approximately a quarter of
the pitch against magnetic pole, from the start position.
Note. For the pitch against magnetic pole, refer to (3) (a) 2) Note 2 in this section.
(b) For the absolute position linear encoder
POINT
The magnetic pole detection is required in the following timings.
When the system is set up (at the first startup of equipment)
After a servo amplifier is replaced
After a linear servo motor (primary-side or secondary-side) is replaced
After a linear encoder (scale or head) is replaced or remounted
If a gap is generated to the positional relation between the linear encoder and
the linear servo motor, perform the magnetic pole detection again.
Perform the magnetic pole detection in the following procedure.
1) Set [Pr. PL01 Linear servo motor/DD motor function selection 1] to "_ _ _ 1" (Magnetic pole
detection at first servo-on).
[Pr. PL01]
Magnetic pole detection at first servo-on (Initial value)
1
2) Execute the magnetic pole detection. (Refer to (3) (a) in this section.)
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































