

























4. STARTUP
4 - 5
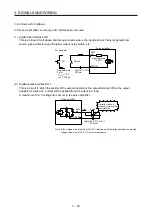
b) When you use a regenerative option for 5 kW or more servo amplifiers
For 5 kW or 7 kW servo amplifiers, the lead wire of the built-in regenerative resistor
connected to P+ terminal and C terminal should not be connected.
The regenerative option should be connected to P+ terminal and C terminal.
Twisted wires cable should be used. (Refer to section 11.2.4.)
c) When you use a brake unit and power regeneration converter for 5 kW or more servo
amplifiers
For 5 kW or 7 kW servo amplifiers, the lead wire of the built-in regenerative resistor
connected to P+ terminal and C terminal should not be connected.
Brake unit, power regeneration converter should be connected to P+ terminal and N-
terminal. (Refer to section 11.3 and 11.4.)
Twisted wires cable should be used when wiring is over 5 m and equal to or less than 10 m
using a brake unit. (Refer to section 11.3)
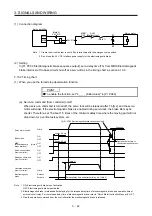
d) When you use a power regeneration common converter for 11 kW or more servo amplifiers
Power regeneration common converter should be connected to P4 terminal and N- terminal.
(Refer to section 11.5.)
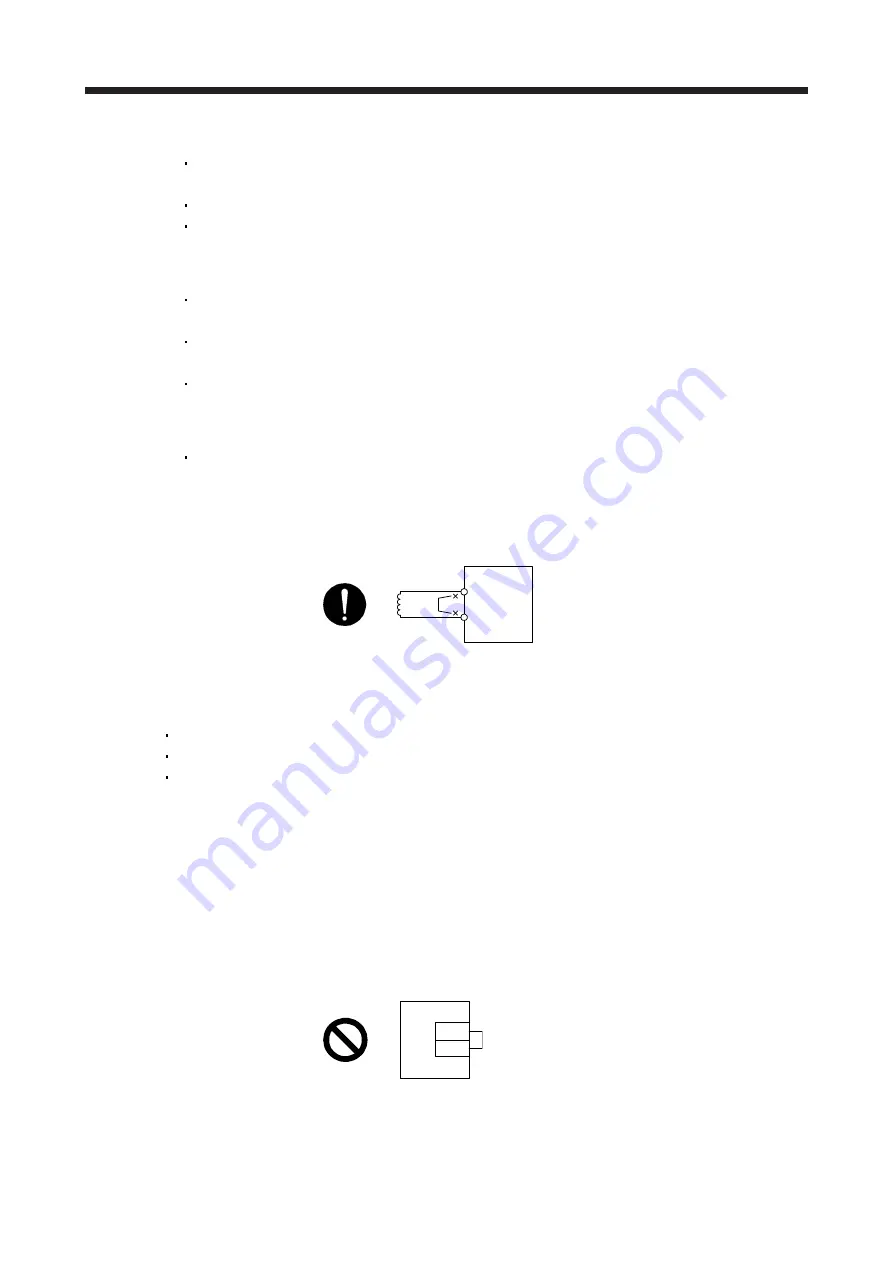
e) The power factor improving DC reactor should be connected between P3 and P4. (Refer to
section 11.11.)
(Note)
Power factor improving
DC reactor
Servo amplifier
P3
P4
Note. Always disconnect between P3 and P4.
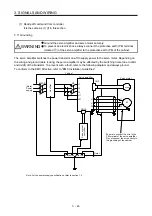
3) 100 V class
The lead wire between P+ terminal and D terminal should not be connected.
The regenerative option should be connected to P+ terminal and C terminal.
Twisted wires cable should be used. (Refer to section 11.2.4.)
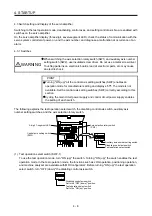
(2) I/O signal wiring
(a) The I/O signals should be connected correctly.
Use DO forced output to forcibly turn on/off the pins of the CN3 connector. You can use this function
to check the wiring. In this case, switch on the control circuit power supply only.
Refer to section 3.2 for details of I/O signal connection.
(b) 24 V DC or higher voltage is not applied to the pins of the CN3 connector.
(c) Plate and DOCOM of the CN3 connector is not shorted.
Servo amplifier
DOCOM
Plate
CN3
Summary of Contents for MR-J4-100B(-RJ)
Page 17: ...8 MEMO ...
Page 143: ...4 STARTUP 4 20 MEMO ...
Page 199: ...5 PARAMETERS 5 56 MEMO ...
Page 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Page 303: ...9 DIMENSIONS 9 22 MEMO ...
Page 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Page 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Page 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Page 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Page 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Page 654: ...APPENDIX App 41 ...







































































