





























1.3 Basic Functions and Function Outlines
1-5
1
1.3 Basic Functions and Function Outlines
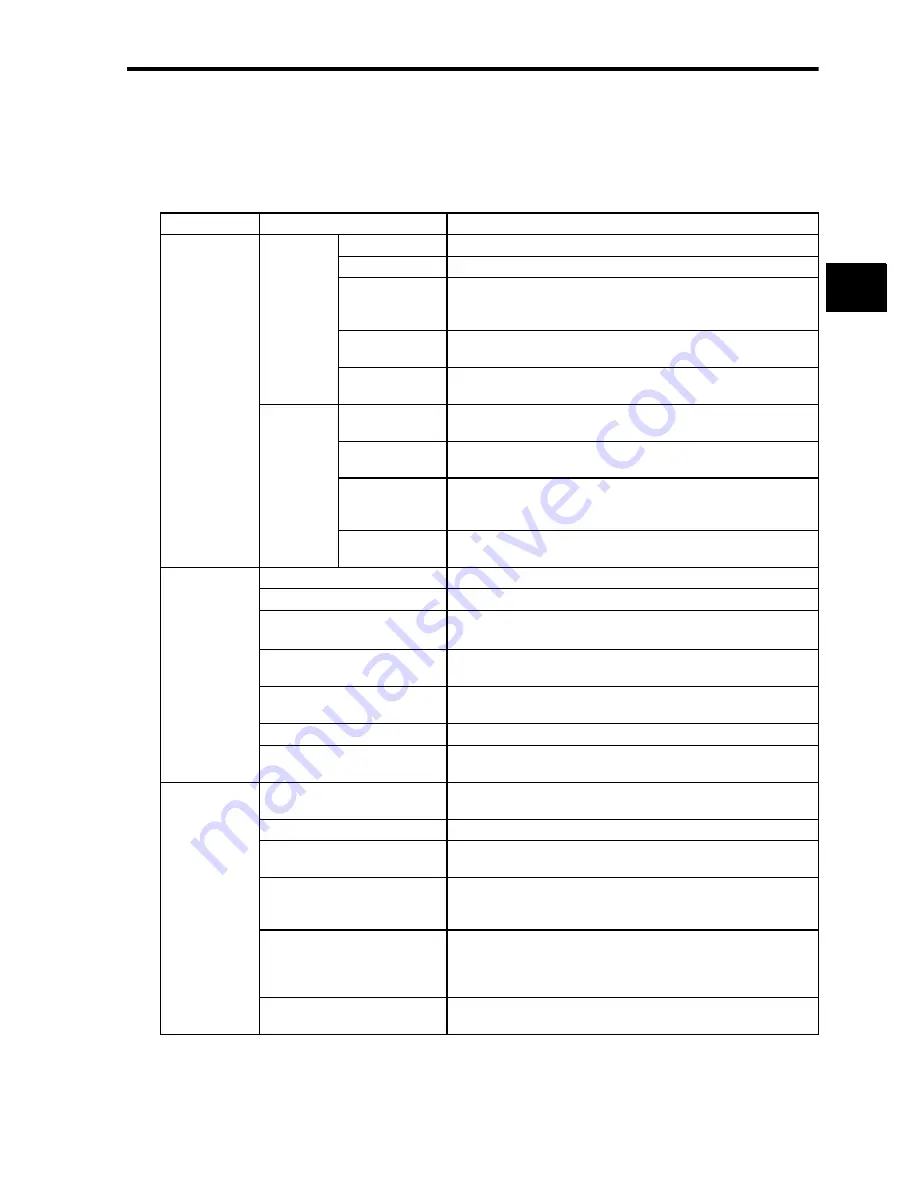
The DeviceNet Unit provides the following functions.
Function
Outline
Move
commands
No-opera-
tion
JOG Command
Moves the axis in the specified direction at the specified speed.
Step Command
Moves the axis the specified amount in the specified direction.
Station
Command
This command can be used when the DeviceNet Unit is being used as a
rotary axis. One rotation of the motor is divided into the specified num-
ber of stations and the axis is positioned at the specified station.
Point Table
Command
Moves the axis to a target position specified in the point table at the tar-
get speed.
Origin Search
Command
Determines the origin using the specified origin search mode.
Operation
Direct Operation
Command
Moves the axis to the specified target position.
Interrupt Feeding
Command
Move the axis the specified amount when a change occurs in the exter-
nal signal status during axis movement.
Notch Output
Positioning
Command
Outputs a notch signal when the specified position is passed during axis
movement.
Multi-speed Posi-
tioning Command
Changes the speed in stages and moves the axis to the specified posi-
tion.
Setting/reading
commands
Parameter Read Command
Reads user parameters from the Servo Driver and DeviceNet Unit.
Parameter Write Command
Writes user parameters to the Servo Driver and DeviceNet Unit.
Present Position Setting
Command
Resets the present position of the motor to a specified position.
Origin Setting Command
When using an absolute encoder, sets the present position of the motor
as the origin.
Alarm Read Command
Reads up to the most recent three alarms that have occurred in the Servo
Driver or DeviceNet Unit.
Monitor Mode Read Command
Reads the monitor mode (Unxxx) displayed on the Servo Driver.
Unit Reset Command
Saves the user parameters in the DeviceNet Unit to flash ROM and then
restarts the Servo Driver and DeviceNet Unit software.
Other functions Tracing
Reads accumulated trace data using Explicit Messages from a PC or
personal computer.
Backlash compensation
Compensates for play in the mechanical system.
Deceleration stop
Decelerates the axis to a stop using a Cancel or Hold Command during
axis movement.
Absolute encoder support
An OMNUC W-series Servomotor with an absolute encoder can be
used. Using an absolute encoder eliminates the need for origin searches,
reducing system startup time.
Software limits
Positioning positions can be monitored in the software separately from
limit input signals to prevent or reduce damage to external devices
resulting from unexpected positioning operations caused by operating
errors.
Linear axis/rotary axis setting
The DeviceNet Unit can be set for application as a linear axis or as a
rotary axis.
Summary of Contents for OMNUC W R88A-NCW152-DRT
Page 1: ...Cat No I538 E3 1 DeviceNet Option Unit OMNUC W Series Model R88A NCW152 DRT...
Page 53: ...4 Connectors 4 5 3 DeviceNet Network Configuration Restrictions 4 22 4...
Page 97: ...5 Parameter Settings 5 3 8 Notch Signal Output Positioning 5 44 5...
Page 211: ...8 Servo Driver Settings 8 5 3 Absolute Encoder Multi turn Limit Setting 8 24 8...
Page 257: ...9 Troubleshooting 9 46 9...







































































