





























3.6 Operation Function List
A3-26
ME0384-4A
Chapt
er 3 G
at
eway
Uni
t
Spec
ific
at
ion
s S
ec
tion
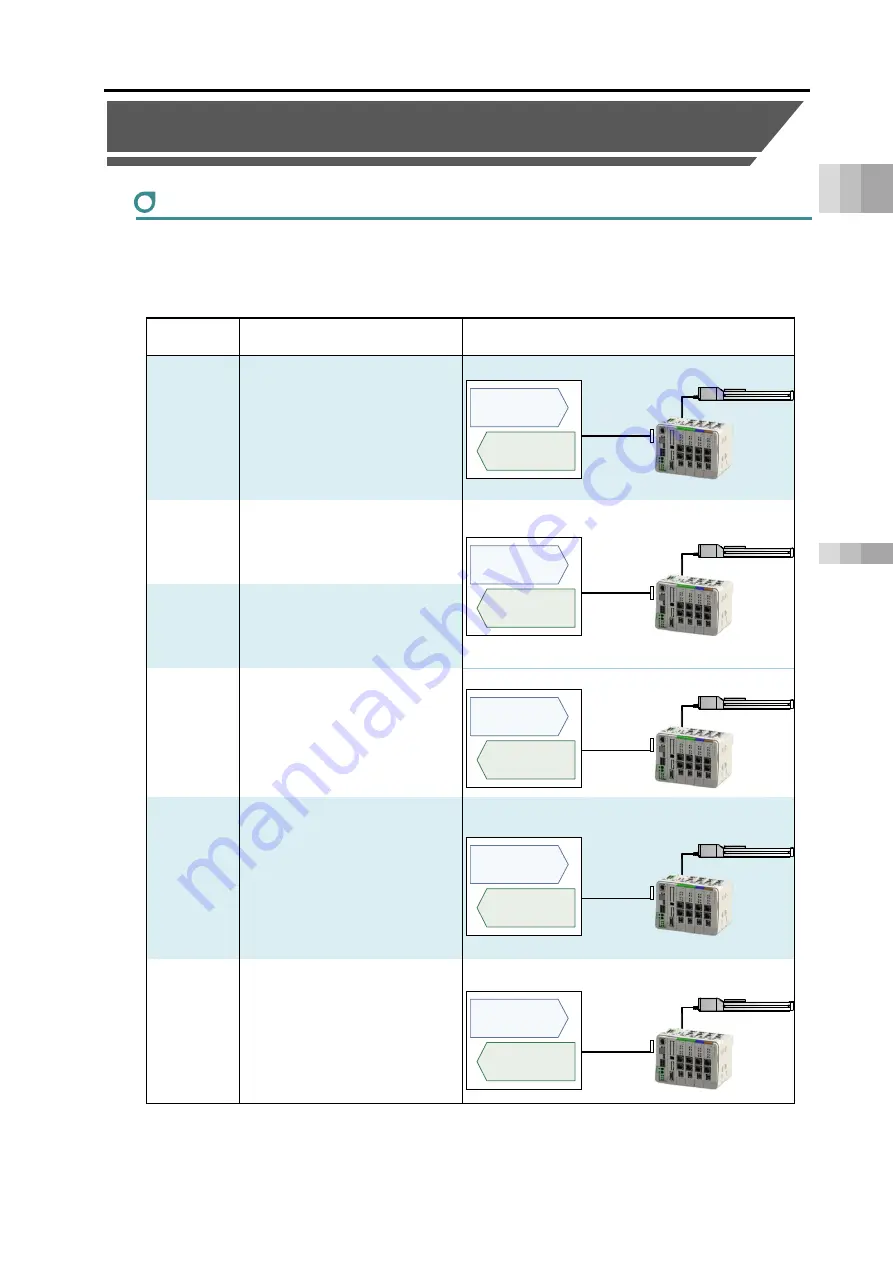
3.6 Operation Function List
Field network control operation mode
The field network control operation mode can be selected from the following control modes.
(except when EC connection unit is connected)
Data required for operation (target position, speed, acceleration, push current value, etc.) are
written by a connected PLC or other host controller into the specified addresses.
* The present current value should be the command current value for the stepper motor and be
the feedback current value for the AC servomotor (including AC servomotor connected to
SCON-CB).
Operation
mode
Content
Overview
Direct
numerical
control
mode
This mode allows designating the
target position, speed,
acceleration/deceleration, and current
limit value for pushing numerically.
Also, it is capable of monitoring the
present position, present speed, and
the present current value (*) with
0.01mm increments.
Simple direct
mode
The target position can be indicated directly by
a number.
Both modes allow monitoring of the present
position numerically with 0.01mm increments.
Positioner 1
mode
Registers up to 128 points of position data,
and can stop at the registered position.
Both modes allow monitoring of the present
position numerically with 0.01mm increments.
Positioner 2
mode
Registers up to 128 points of position
data, and can stop at the registered
position.
This mode does not allow monitoring of
the present position.
This mode has less in/out data transfer
volume than the Positioner 1 mode.
Positioner 3
mode
Registers up to 128 points of position
data, and can stop at the registered
position.
This mode does not allow monitoring of
the present position.
This mode has less in/out data transfer
volume than the Positioner 2 mode,
and controls travel with the minimum of
signals.
Positioner 5
mode
Registers up to 16 points of position
data, and can stop at the registered
position.
This mode has less in/out data transfer
volume and fewer positioning tables
than the Positioner 2 mode, and allows
monitoring of the present position
numerically with 0.1mm increments.
Field network
communication
Actuator
PLC
Target position
Positioning width
Speed, acceleration/deceleration
Pushing percentage Control signal
Present position
Present current value *
Present speed (command value)
Alarm code Status signal
Field network
communication
Actuator
PLC
Target position
Target position No.
Control signal
Present position
Completed position No.
Status signal
Field network
communication
Actuator
PLC
Completed position No.
Status signal
Target position No.
Control signal
Field network
communication
Actuator
PLC
Completed position No.
Status signal
Target position No.
Control signal
Field network
communication
Actuator
PLC
Target position No.
Control signal
Present position
Completed position No.
Status signal
Summary of Contents for Rcon
Page 12: ...ME0384 4A ...
Page 32: ...Actuator Coordinate System Intro 20 ME0384 4A ...
Page 42: ...1 3 General Specifications A1 9 ME0384 4A Specifications Section Chapter 1 RCON Overview ...
Page 45: ...ME0384 4A ...
Page 291: ...ME0384 4A ...
Page 323: ...ME0384 4A ...
Page 384: ...1 3 Startup Procedure B1 9 ME0384 4A Startup Section Chapter 1 Overview ...
Page 420: ...3 6 Precautions B3 15 ME0384 4A Startup Section Chapter 3 Absolute Reset ...
Page 588: ...6 2 Various Functions B6 81 ME0384 4A Startup Section ...
Page 837: ......
Page 838: ......