





























X20 system modules • Motor controllers • X20SM1426
2008
X20 system User's Manual 3.10
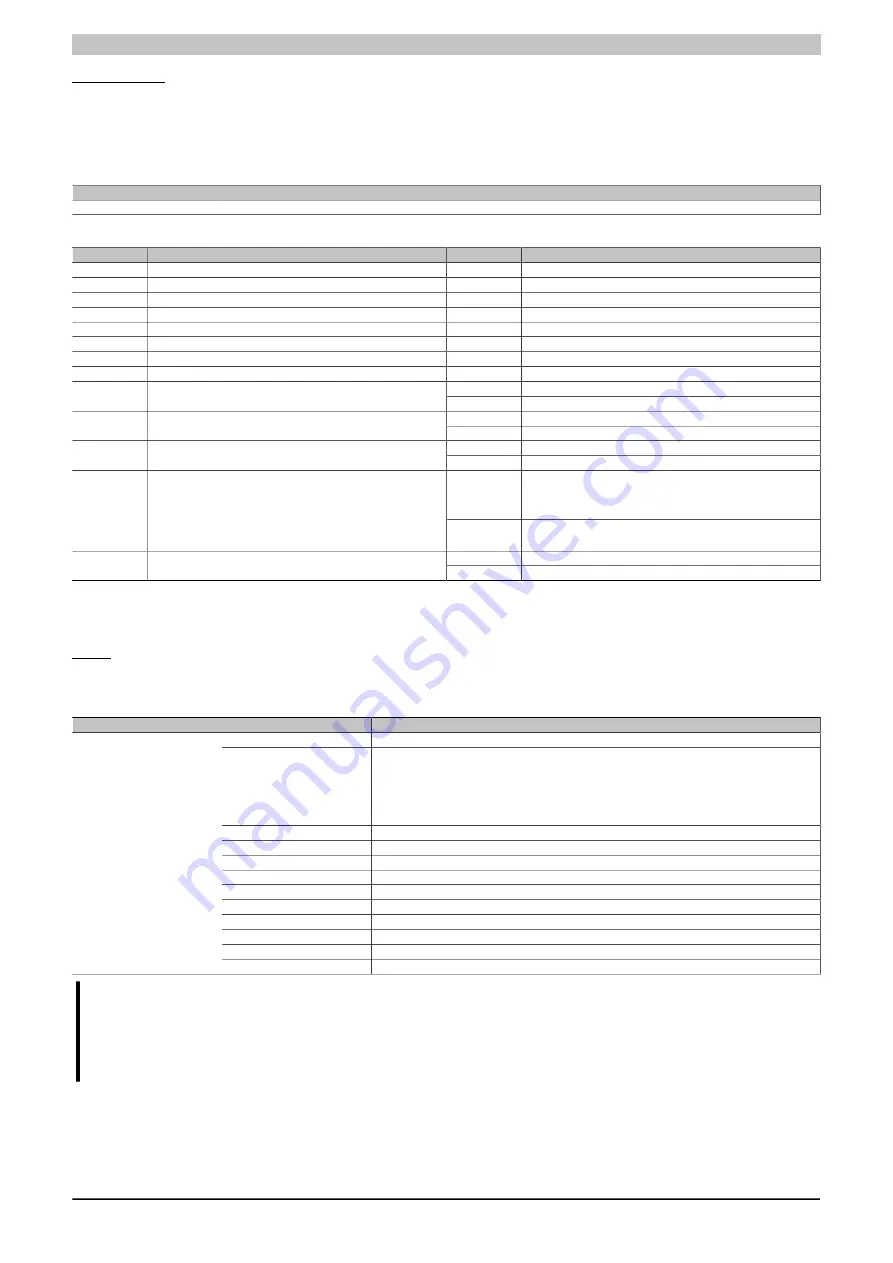
Control word
Name:
MpGenControl01
This register can be used to issue commands based on the module's state (see 4.25.6.13.7 "Ramp function model
Data type
Value
UINT
See bit structure.
Bit structure:
Bit
Description
Value
Information
0
Switch on
x
1
Enable voltage
x
2
Quick stop
x
3
Enable operation
x
4 - 6
Mode-specific
x
7
Fault reset
x
8
Halt (stop)
1)
x
9 - 10
Reserved
0
0
No effect
11
Motor ID trigger
1
Rising edge: Motor ID trigger
2)
0
No effect
12
Warning reset
1
Rising edge: Reset warnings
0
Disable current error detection (default)
13
Undercurrent detection
1
Enable current error detection
0
Default:
•
Internal position counter, cyclic
•
ABR counter, non-cyclic
14
ABR counter sync/async
1
•
Internal position counter, non-cyclic
•
ABR counter, cyclic
0
Disable stall detection (default)
15
Stall detection
1
Enable stall detection
1)
The "Halt" bit is only evaluated when the extended control word is enabled (see "General configuration").
2)
This bit can be used to trigger a measurement of the motor ID. Keep in mind that the application must ensure that the conditions for measurement are fulfilled
(see table in the "Motor ID" register).
Mode
Name:
MpGenMode01
Data type
Value
Information
0
No mode selected
1
Depending on bit 0 in the General configuration register, the position mode will behave as follows:
•
Position mode without extended control word: Move to position setpoint as soon as po-
sition setpoint is changed
•
Position mode with extended control word: Move to position setpoint as described in
"Mode 1 - Position mode with extended control word"
2
-120
-121
-122
-123
Move to position setpoint when external input is set
-124
-125
Move to fixed position A (position set asynchronously)
-126
Move to fixed position B (position set asynchronously)
-127
Positive homing (see also "Homing configuration")
SINT
-128
Negative homing (see also "Homing configuration")
Information:
For all modes: The "Target reached" bit is set in the Status word register when the current action is
finished (i.e. when the position or speed is reached, depending on the mode).
A new position or speed can be specified even before the current action is finished.
Summary of Contents for X20 System
Page 2: ......







































































