X20 system modules • X20 electronics module communication • X20CS1070
1622
X20 system User's Manual 3.10
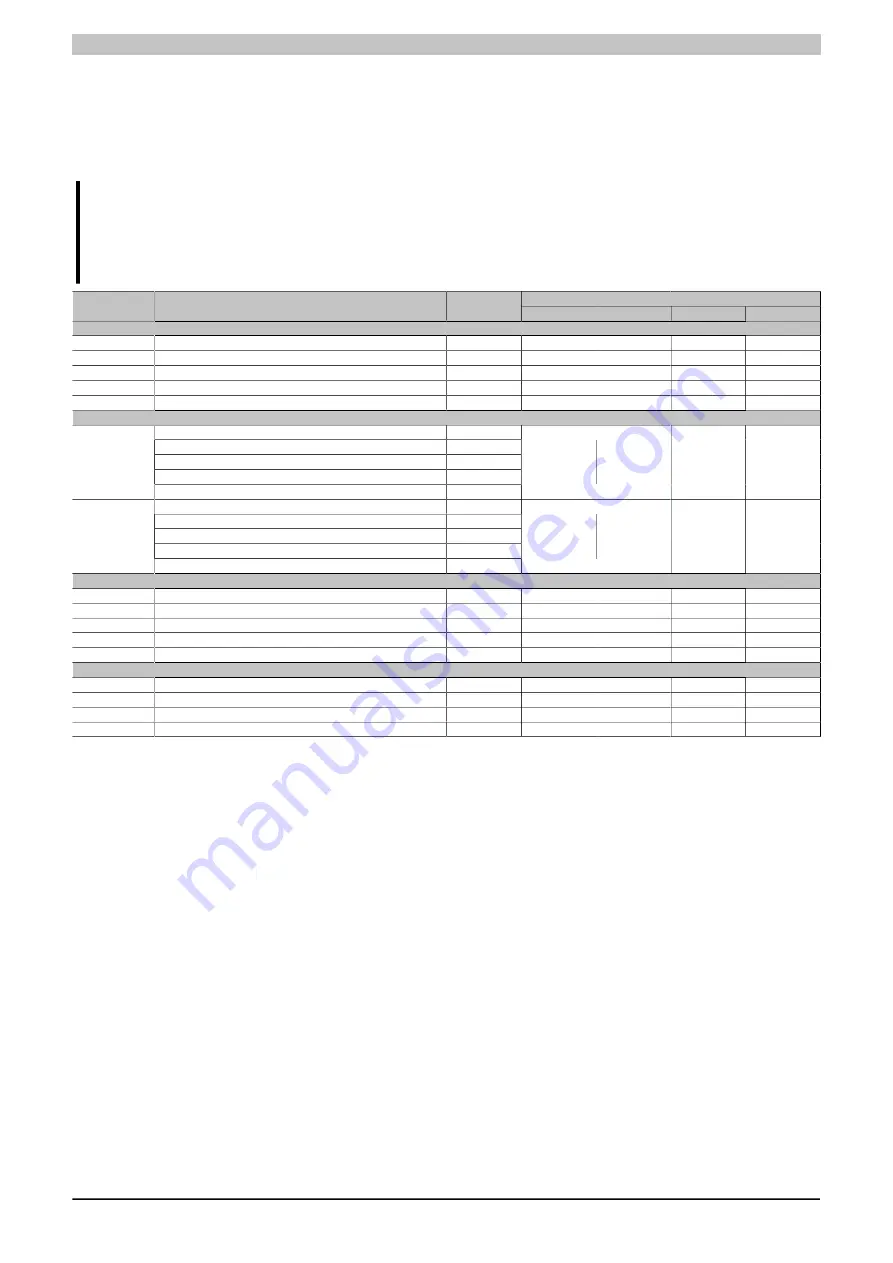
4.18.7.7.3 Function model 254 - FlatStream
The "FlatStream" function model provides independent communication between an X2X Link master and the mod-
ule. This interface was implemented as a separate function model for the CAN module. CAN information (identifier,
status, etc.) is transferred via cyclic input and output registers. The sequence and control bytes are used to control
this data stream (see 4.18.7.7.11 "FlatStream communication" on page 1632).
Information:
•
The "CAN_Lib" library can't be used.
•
Higher data rates can be achieved between X2X master and module compared to the "Flat"
function model.
Read
Write
Register
Name
Data type
Cyclic
Non-cyclic
Cyclic
Non-cyclic
Interface - Configuration
257
USINT
●
259
USINT
●
261
USINT
●
266
UINT
●
6273
USINT
●
Interface - Communication
USINT
CANwarning
Bit 0
CANpassive
Bit 1
CANbusoff
Bit 2
6145
CANRXoverrun
Bit 3
●
USINT
QuitCANwarning
Bit 0
QuitCANpassive
Bit 1
QuitCANbussoff
Bit 2
6209
QuitCANRXoverrun
Bit 3
●
FlatStream - Configuration
193
USINT
●
195
USINT
●
197
USINT
●
199
USINT
●
206
UINT
●
FlatStream - Communication
0
USINT
●
Index * 1 + 0
USINT
●
32
USINT
●
Index * 1 + 32 TxByte1 to TxByte27
USINT
●
Summary of Contents for X20 System
Page 2: ......