





























3. SIGNALS AND WIRING
3 - 36
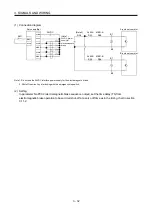
3.11.3 Wiring diagrams (HF-MP series HF-KP series servo motor)
POINT
For HF-SP/HC-UP/HC-LP/HF-JP series servo motors, refer to section 3.10.2 (2).
(1) When cable length is 10m or less
MR-BKS1CBL M-A1-L
MR-BKS1CBL M-A2-L
MR-BKS1CBL M-A1-H
MR-BKS1CBL M-A2-H
MR-BKS1CBL M-A1-L
MR-BKS1CBL M-A2-L
MR-BKS1CBL M-A1-H
MR-BKS1CBL M-A2-H
24VDC power
supply for
electromagnetic
brake
AWG20
AWG20
(Note 1)
B1
B2
Servo motor
10m or less
U
B
AWG20
AWG20
B1
B2
U
B
A-axis electromagnetic
brake interlock
(MBR-A)
(Note 3)
A-axis malfunction
(ALM-A)
(Note 2)
Servo motor
(Note 2)
B-axis electromagnetic
brake interlock
(MBR-B)
B-axis malfunction
(ALM-B)
(Note 1)
(Note 4)
Note 1. Connect a surge absorber as close to the servo motor as possible.
2. There is no polarity in electromagnetic brake terminals (B1 and B2).
3. Shut off the circuit by interlocking with the emergency stop switch.
4. Do not use the 24VDC interface power supply for the electromagnetic brake.
When fabricating the motor brake cable MR-BKS1CBL- M-H, refer to section 11.1.4.
Summary of Contents for MELSERVO-J3W Series
Page 17: ...8 MEMO ...
Page 27: ...1 FUNCTIONS AND CONFIGURATION 1 10 MEMO ...
Page 87: ...4 STARTUP 4 14 MEMO ...
Page 117: ...5 PARAMETERS 5 30 MEMO ...
Page 129: ...6 GENERAL GAIN ADJUSTMENT 6 12 MEMO ...
Page 185: ...10 CHARACTERISTICS 10 8 MEMO ...
Page 241: ...11 OPTIONS AND AUXILIARY EQUIPMENT 11 56 MEMO ...
Page 274: ...13 USING A LINEAR SERVO MOTOR 13 25 1 2 3 4 ...







































































