





























21-516
21-516
21.4.2.5. Copying a hand / robot parts / user mechanism
Follow the procedure below to copy a hand / robot parts / user mech. in the layout tree.
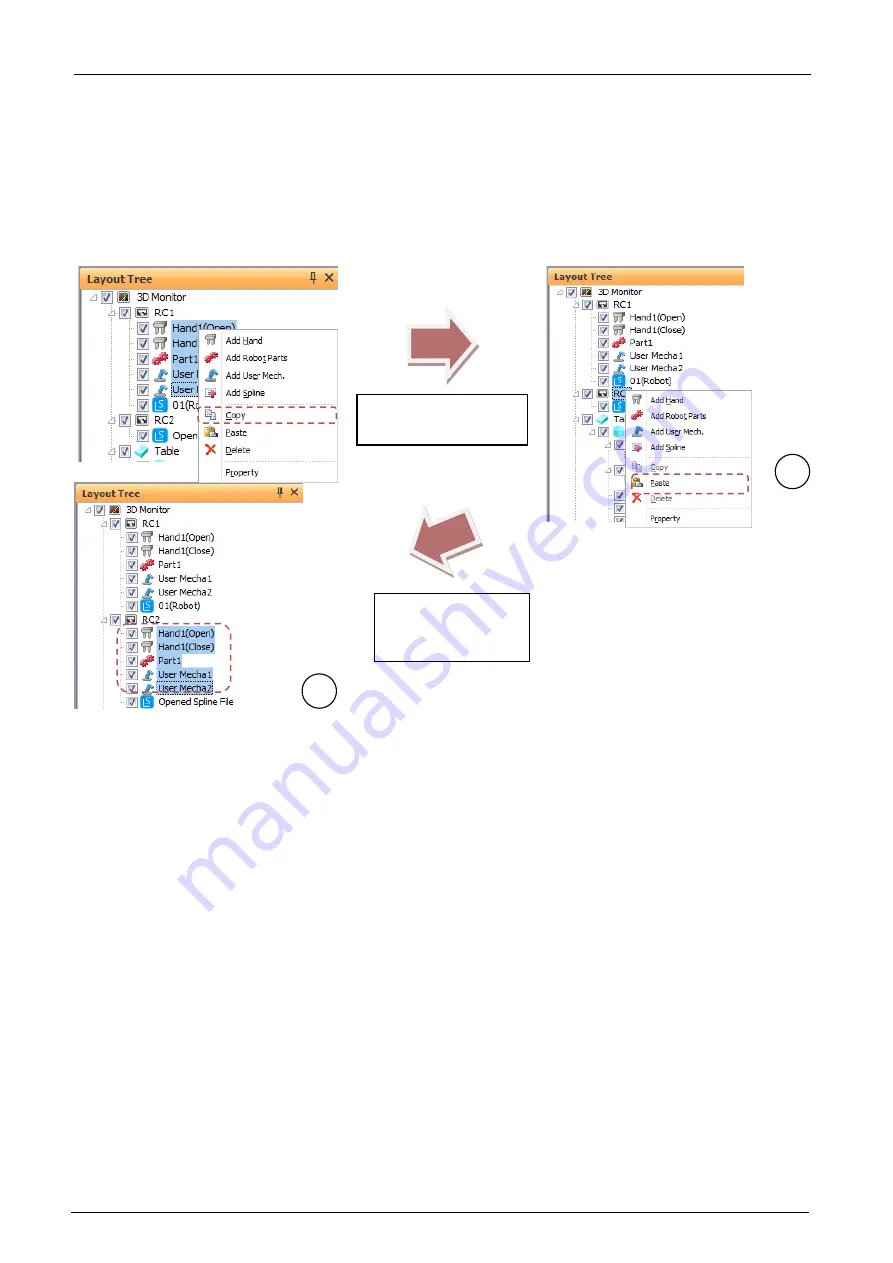
(1) Select the hand / robot parts / user mech. to copy, and select [Copy] from the context menu.
(2) Right-click again on the copy destination robot, and select [Paste] from the context menu.
(3) The selected hand / robot parts / user mech. is copied to the right-clicked robot.
Or, a hand / robot parts / user mech. can be copied immediately under a specific hand by right-clicking that hand /
robot parts / user mech. and selecting [Paste].
Figure 21-19 Operation of Copying Hands / Robot Parts / User Mechanism
Select item to copy
and click [Copy]
Select copy
destination robot
and click [Paste]
1
2
3
Содержание 3F-14C-WINE
Страница 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Страница 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Страница 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Страница 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Страница 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Страница 624: ...24 624 24 624 Figure 24 4 Document output example ...