





























14-309
14-309
14.3.4. Register (CC-Link/EtherCAT)
You can check the statuses of registers input to the robot controller from external equipment and registers output
from the robot controller to external equipment.
From the project tree, double-click the target project [Online] -> [Monitor] -> [Signal Monitor] -> [Register
(CC-Link) or Register (EtherCAT)].
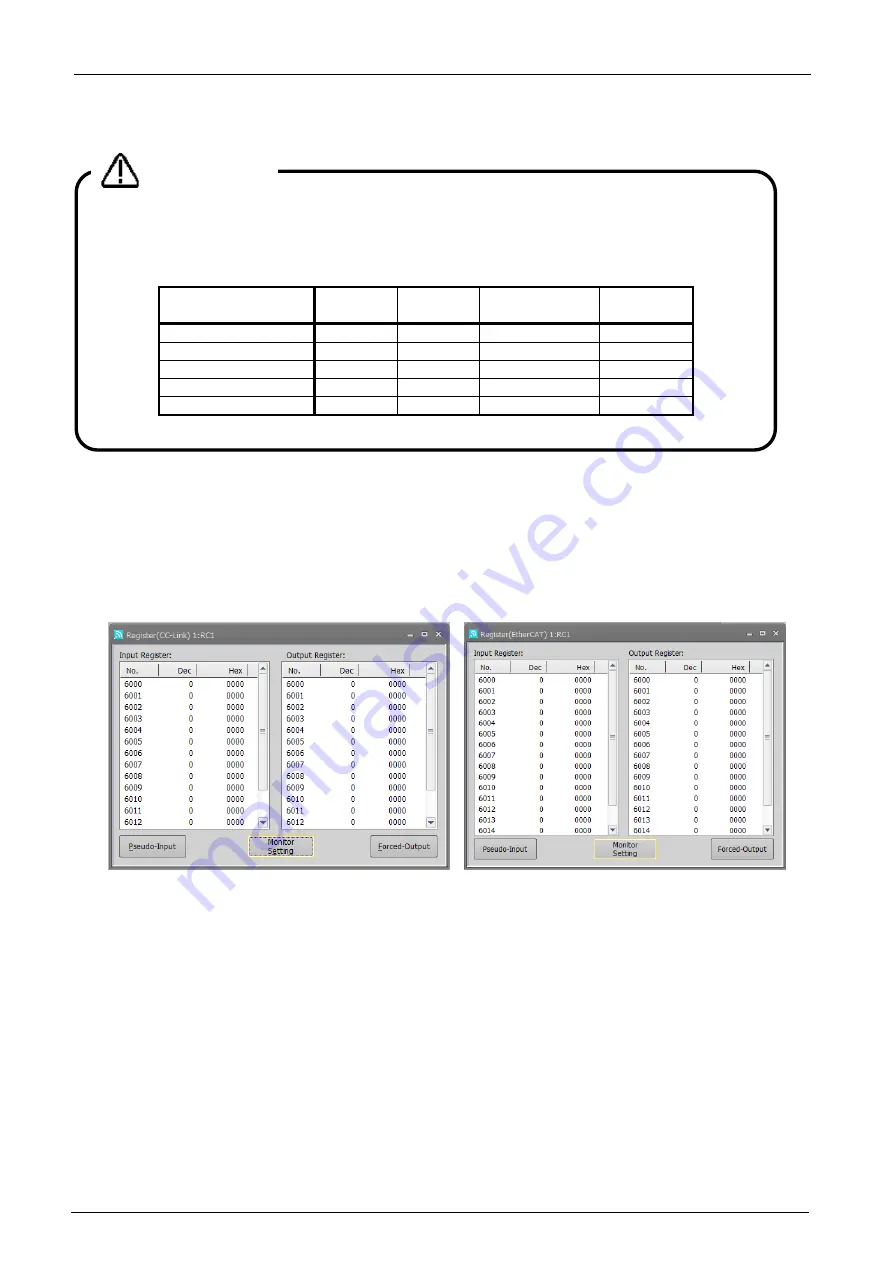
The left side of the screen displays the status of the input registers and the right side displays the status of the
output registers.
A continuous range of registers to display can be set freely in [Monitor Settings].
Pseudo-input and forced output of registers are also possible.
Figure 14-38 Registers (CC-Link/EtherCAT)
This can only be used if the CC-Link/EtherCAT option card is mounted
on the robot controller or CC-Link IE Field Basic function is enable.
Table 14-5 Register (CC-Link) Screen Correspondence Table
Robot Contoroller
CC-Link
CC-Link
IE Field
CC-Link
IE Field Basic
EtherCAT
CRn-500
○
×
×
×
CR750-D/CRnD-700
○
×
×
×
CR750-Q/CRnQ-700
×
×
×
×
CR800-D
○
○
○
(A1c or later)
○
(A3b or later)
CR800-Q
×
×
○
(A1c or later)
×
○ : Enable, × :
Disable
Caution
Содержание 3F-14C-WINE
Страница 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Страница 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Страница 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Страница 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Страница 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Страница 624: ...24 624 24 624 Figure 24 4 Document output example ...







































































